Lecture 3-4 Soft Shadow
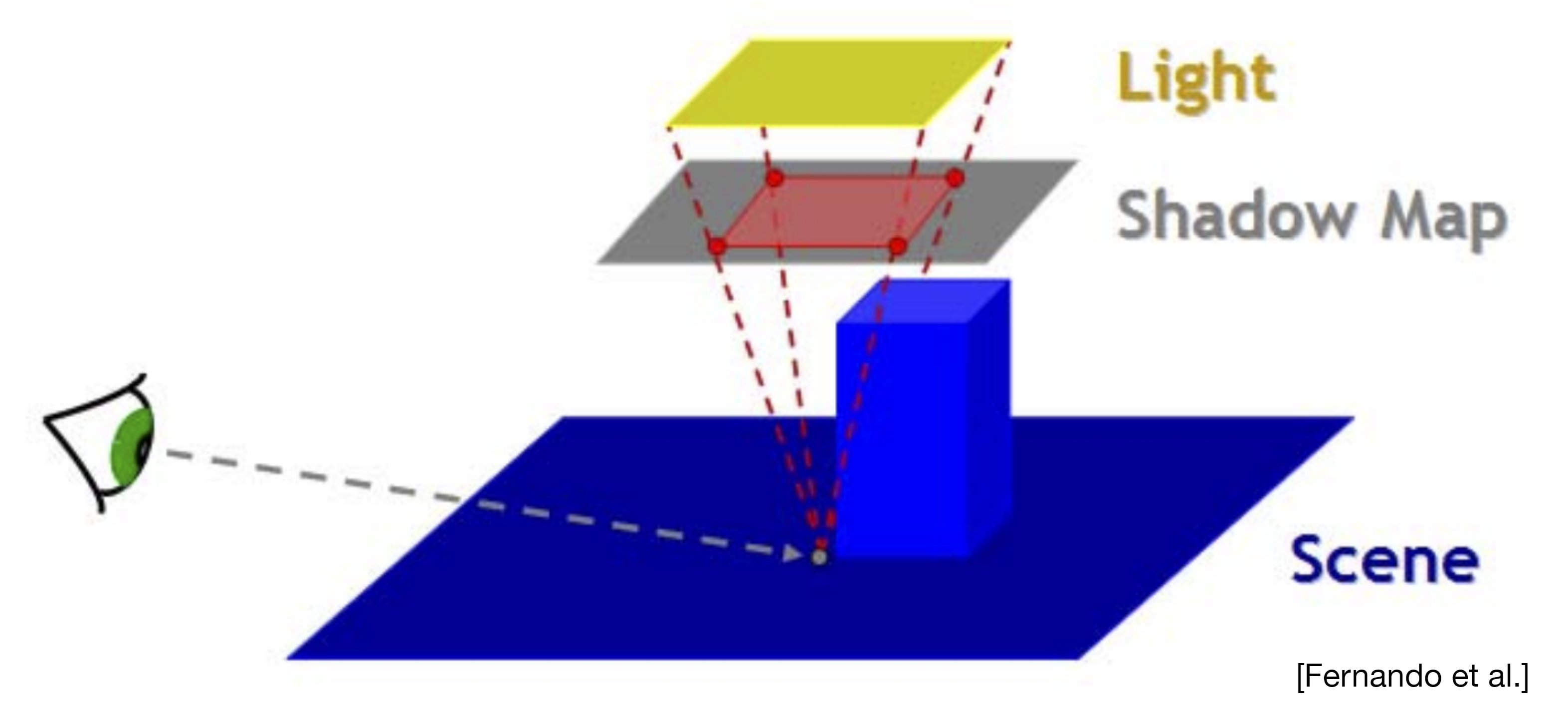
Recap of Shadow Mapping - 点光源
- 从“Light”处看向场景,生成场景关于光源的深度图,即Shadow Map;
- 从相机处看向场景渲染画面,利用Shadow Map判断像素是否在阴影中。
Feature:
- 基于二维图像的算法,而不需要三维几何场景
- 使用透视投影后Z值或透视投影前实际距离生成深度图皆可,Shadow Map与阴影生成时的深度判定方式一致即可
Problem
Self occlusion 自遮挡
Shadow Map的每一个像素记录同一深度,形成下图现象。在单个/行像素采样处,形成尺寸为像素宽高的遮挡面。
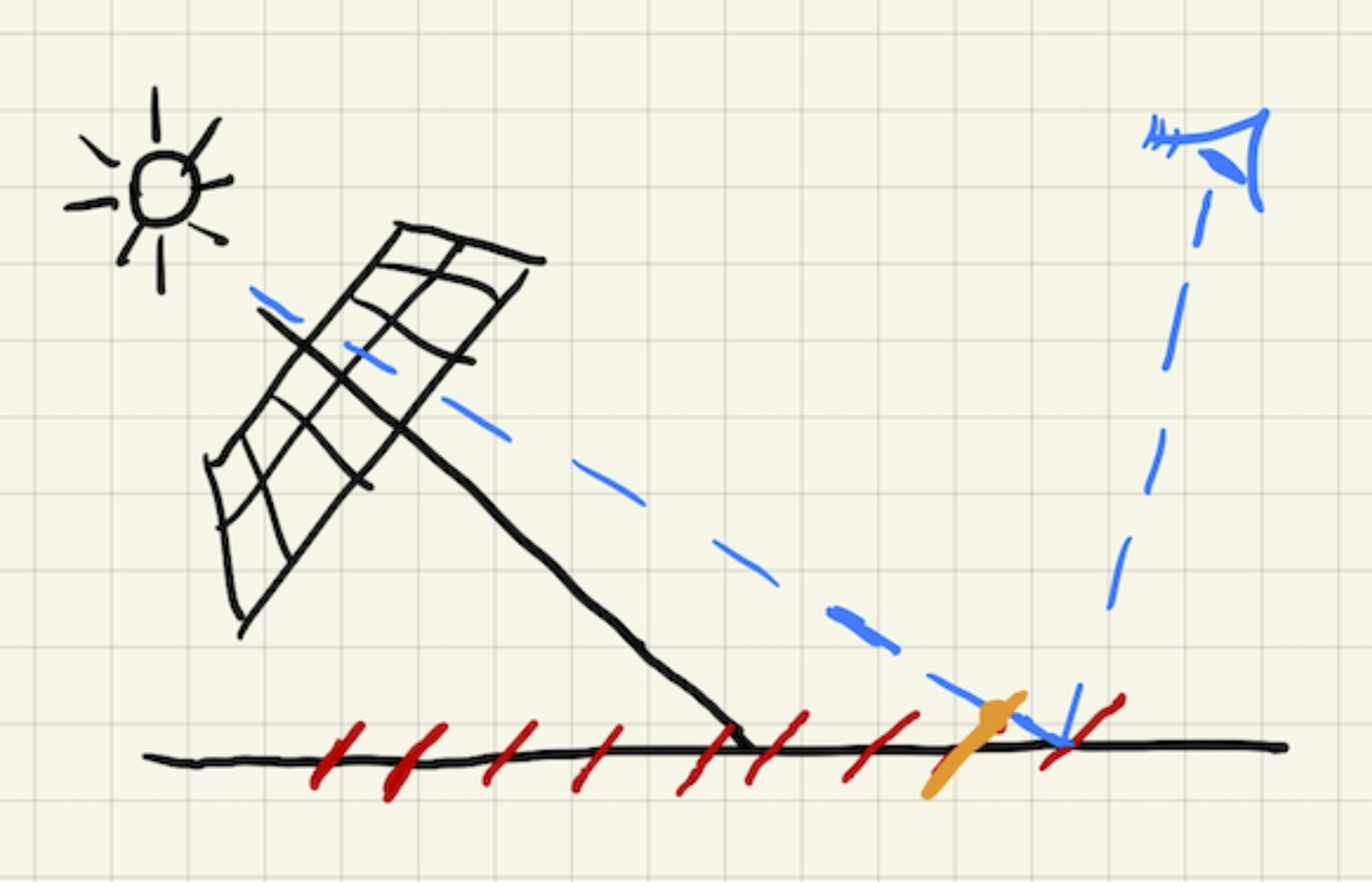
解决方案:在反射表面邻近区域不计算遮挡。不计算区域Light长度(Bias)由Light与反射表面法线夹角决定。(Light垂直于表面时不产生自遮挡问题)。——带来新问题:丢失遮挡关系。
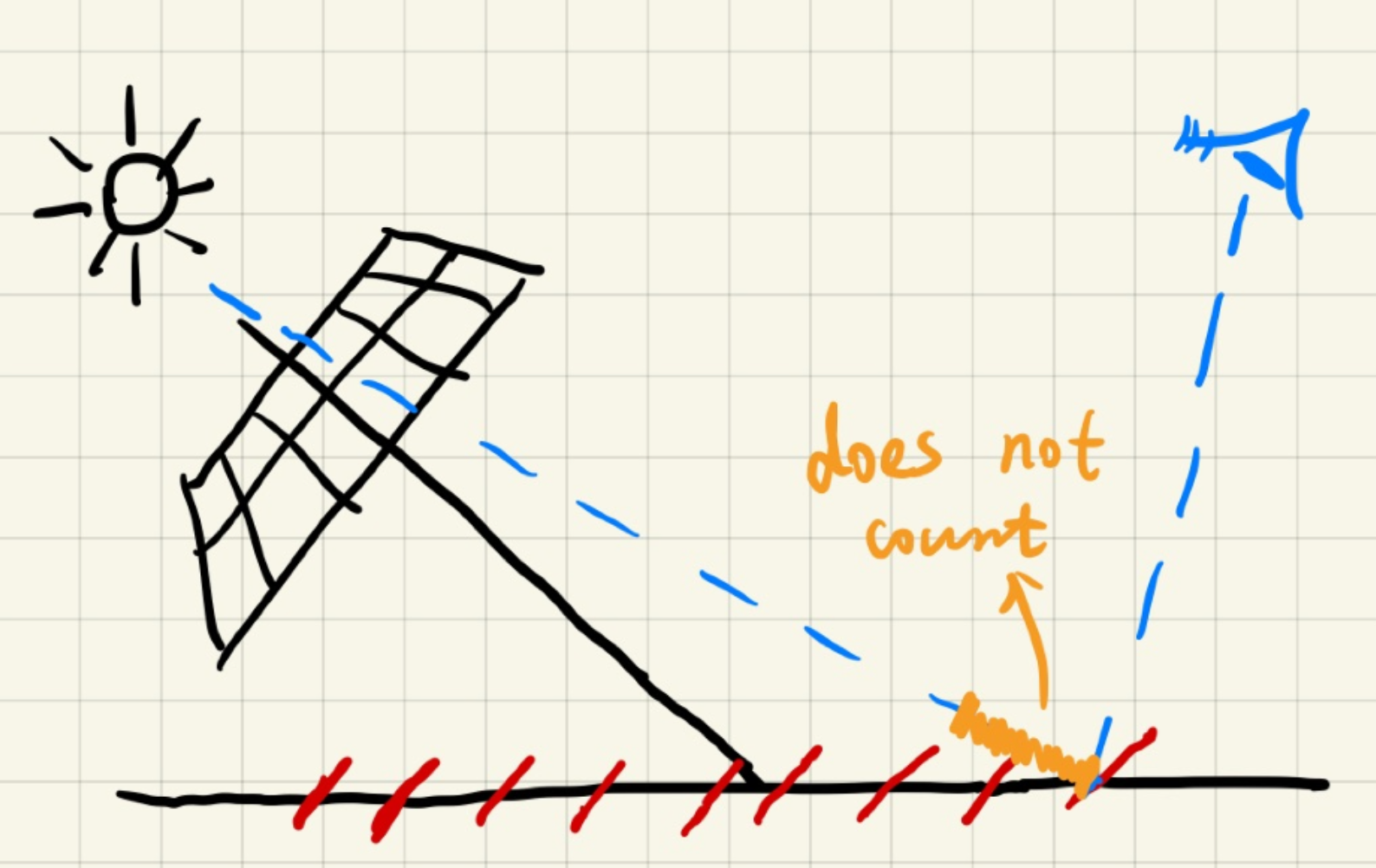
Detached shadow 由解决自遮挡的Bias不计算带来的阴影残缺问题。
工业界无法彻底解决该问题,通过找到合适的Bias值减少视觉问题。
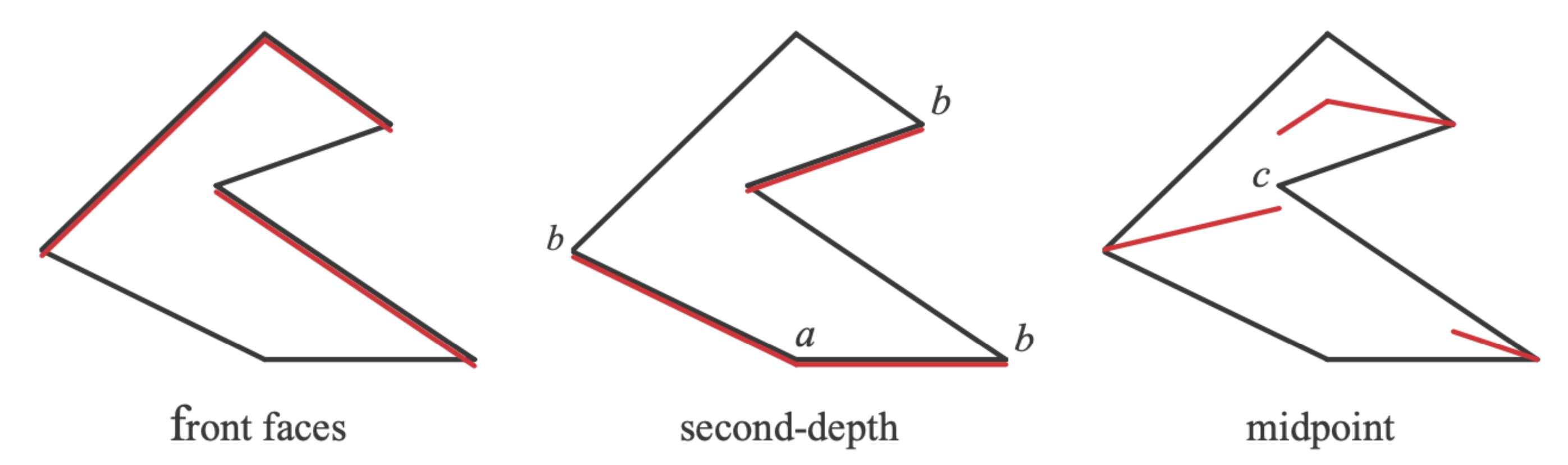
学术解决方案:Second-depth shadow mapping
- 存储第一深度和次级深度(离得第二近的表面距离),取中间值作为深度判断的值。
- 存在问题:要求所有物体watertight(有正反面);计算量过大。
- 实时渲染不相信复杂度,只相信绝对速度!因此工业界不适用。
Aliasing 采样
The math behind shadow mapping
微积分中常见的不等式: \[ \begin{array}{c} Schwarz不等式: \displaystyle\left[\int_a^bf(x)g(x)\,\mathrm d x\right]^2\le\int_a^bf^2(x)\,\mathrm d x\cdot\int_a^bg^2(x)\,\mathrm d x\\ Minkowski不等式:\displaystyle\left\{\int_a^b\left[f(x)+g(x)\right]^2\,\mathrm d x\right\}^\frac{1}{2}\le\left\{\int_a^bf^2(x)\,\mathrm d x\right\}^\frac{1}{2}+\left\{\int_a^bg^2(x)\,\mathrm d x\right\}^\frac{1}{2} \end{array} \] Approximation in RTR: But we care more about “approximately equal”. 实时渲染中常将不等式当作约等式使用。
An important approximation: \[ \displaystyle\int_\Omega f(x)g(x)\,\mathrm d x\approx\frac{\int_\Omega f(x)\,\mathrm d x}{\int_\Omega \,\mathrm d x}\cdot\int_\Omega g(x)\,\mathrm d x \]
其中 \(\int_\Omega \,\mathrm d x\) 为归一化常数。
该式何时较准确:
- 积分域较小时
- \(g(x)\) 在积分域内变化不大(Smooth)
Recall:Rendering Equation with Explicit Visibility \[ L_o(p,\omega_o)=\int_{\Omega+}L_i(p,\omega_i)f_r(p,\omega_i,\omega_o)\cos\theta_iV(p,\omega_i)\,\mathrm d \omega_i \] Approximated as: \[ L_o(p,\omega_o)\approx\frac{\int_{\Omega+}V(p,\omega_i)d\omega_i}{\int_{\Omega+}d\omega_i}\cdot\int_{\Omega+}L_i(p,L_i(p,\omega_i)f_r(p,\omega_i,\omega_o)\cos\theta_i\,\mathrm d \omega_i \] 即将Visibility部分 \(V(p,\omega_i)\) 单独计算。则非Visibility部分为纯Shading部分,Visibility近似部分为“Shadow Mapping”部分。
何时准确:
- 点光源/方向光源(积分域小)
- Diffuse/面光源(其中一个积分函数平滑)
Ambient Occlusion 环境光遮蔽中将再次用到类似的约等式
PCSS: Percentage Closer Soft Shadows
PCF: Percentage Closer Filtering
- [ For anti-aliasing at shadows’ edges - Not for soft shadows ]
- Filtering the result of shadow comparisons
[Solution]
- 根据Shadow Map判断像素是否在阴影中:不判断一个像素,判断对应像素周围的一圈像素(如7*7网格)
- 得到该组像素判断的平均值,赋给中心像素(原判断像素)
- 计算量?PCSS时一并解决
- 将Filter范围再放大得到软阴影?!
PCSS
软阴影:近处锐利,远处模糊 —— Filter Size <-> Blocker Distance
\(w_{Penumbra}=(d_{recevier}-d_{Blocker})\cdot w_{Light}/d_{Blocker}\)
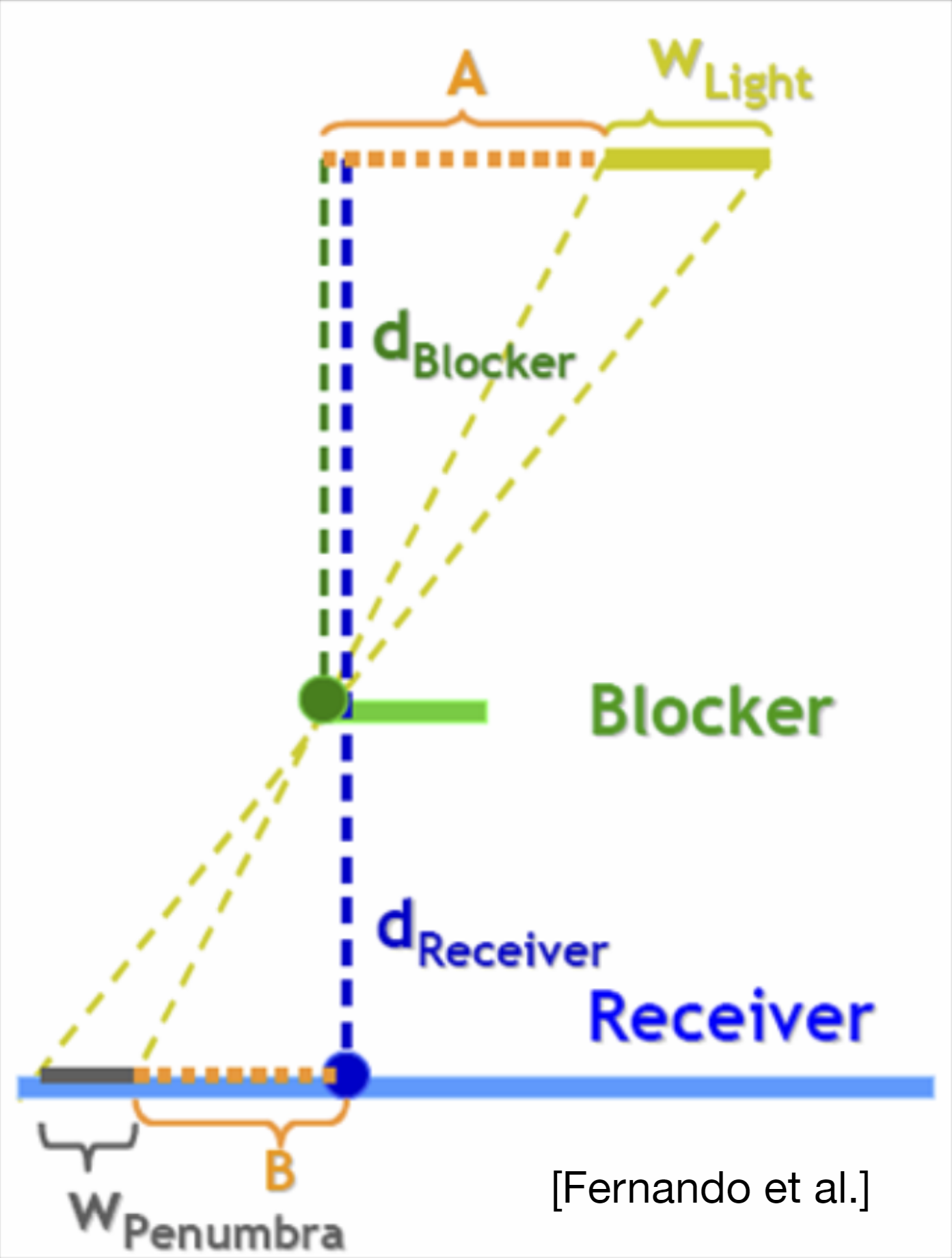
Block Depth: Average block depth 在一定范围内,一个Shading Point被遮挡的平均深度值
Complete algorithm
- Blocker search : Getting the average depth in a certain region (视面光源中心为点光源生成Shadow Map)
- Penumbra estimation : Use the average blocker depth to determine filter size
- Percentage Closer Filtering
Blocker search的范围(得到Average block depth的方式)如何确定?
取固定范围,如5*5
[Better] 取决于光源面积和光照接收面到光源的距离
 \[
\rm
size_{Blocker}=distance_{ShadowMap2Scene}/distance_{Light2Scene}\cdot
size_{Light}
\]
\[
\rm
size_{Blocker}=distance_{ShadowMap2Scene}/distance_{Light2Scene}\cdot
size_{Light}
\]
开销巨大:下节课解决
A deeper look at PCF
The math behind PCF: Filter/Convolution \[ [w*f](p)=\sum_{q\in\mathcal{N}(p)}w(p,q)f(q)\quad\quad N(p):p的邻域 \] In PCSS \[ V(x)=\sum_{q\in\mathcal{N}(p)}w(p,q)\cdot\chi^+[D_{SM}(q)-D_{scene}(x)]\quad\quad\chi^+(A)=A>0?1:0 \] 因此:
- PCF并不是对Shadow Map的滤波 \[ V(x)\neq\chi^+\{[w*D_{SM}](q)-D_{scene}(x)\} \]
- PCF也不是对结果图像做滤波 \[ V(x)\neq\sum_{q\in\mathcal{N}(p)}w(p,q)V(q) \]
More about PCSS
[Blocker Search] and [PCF] is slow to look at every texel.
- [Blocker Search] 随机取样 => Noise
- [PCF] Filter范围过大,随机采样 -> 图像空间降噪
Variance Soft Shadow Mapping
- Fast blocker search and filtering
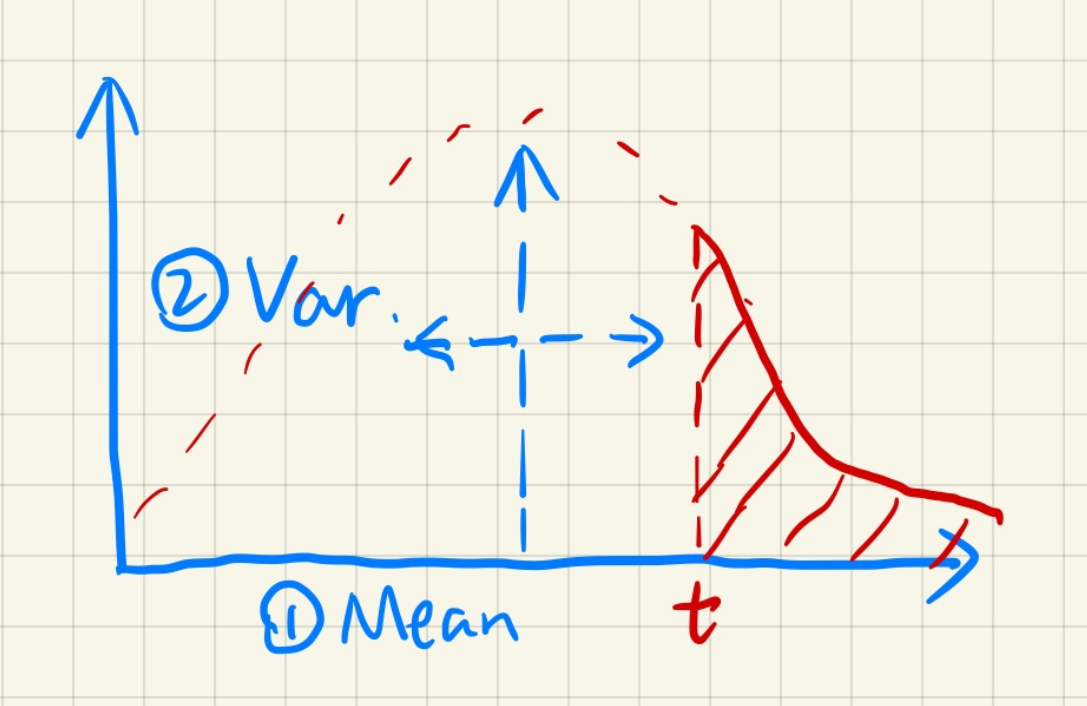
[ Filter ] PCF:根据正态分布可估计 Percentage Closer Value 正态分布由均值mean和方差variance定义
- Mean
- Hardware Mipmaping 但只能正方形
- Summed Area Tables (SAT)
- Variance
- \[ Var(X)=E(X^2)-E^2(X)\quad E:期望=均值 \]
- 另一张“Shadow Map”记录深度的平方,称为“Square depth map”
由此得到正态分布图,求得CDF(x) of the Gaussian
PDF即可(即0-x的积分)。
该积分没有解析解只有数值解,可通过高斯分布积分表Error
Function得到CDF值。在cpp中使用erf()求数值解,但计算仍较复杂。
因此引入切比雪夫不等式估计值: \[ P(x>t)\le\frac{\sigma^2}{\sigma^2+(t-\mu)^2}\quad\quad\begin{aligned}\mu&: mean\\\sigma^2&:variance\end{aligned} \] 对任意分布方式,通过切比雪夫不等式估得右侧积分值 \(P(x>t)\) ,再由 \(1-P(x>t)\) 得到 \(CDF(x)\) 。 仅t>mean时较准,但工业界往往直接用。
总结 + Shadow map generation + “Square depth map” + Runtime + Mean of depth in a range: O(1) + Mean of depth square in a range: O(1) + Chebychev: O(1) + No samples / loops needed + Perfectly ? 改变视角需要重新生成map 产生较大开销 GPU解决起来速度非常快
[ Block Search ]
Target: The average depth of blockers ( texels whose depth z < t, \(z_{occ}\) ) \(\Rightarrow\begin{array}{l}blocker:z_{occ}\\non-blocker:z_{unocc}\end{array}\)
\[ \displaystyle\frac{N_1}{N}z_{unocc}+\frac{N_2}{N}z_{occ}=z_{avg} \]
Chebychev Approximation: \(\displaystyle\frac{N_1}{N}=P(x>t)\quad\frac{N_2}{N}=1-P(x>t)\)
Approximation: \(z_{unocc}=t\)
MIPMAP and Summed-Area Variance Shadow Maps
Recall: MIPMAP
- fast, approx., square range queries
- 非 \(1/n^i\) 方形区域,需使用线性插值
- 不精准,限制多
SAT (Summed-Area Table)
in 1D: 第 \(i\) 位存储 \(0-i\) 的和
SAT[0] = Arr[0]; for(int i = 1, i < n, ++i) { SAT[i] = SAT[i-1] + Arr[i]; } //Sum of a to b float sum(int a, int b) { return SAT[b] - SAT[a-1]; }in 2D: 第 \((i,j)\) 位存储 \((0,0)-(i,j)\) 的矩形区域和
// m * n for(int i = 0, i < n, ++i) { SAT[i][0] = Arr[i][0]; for(int j = 1, j < n, ++j) { SAT[i][j] = SAT[i][j-1] + Arr[i][j-1]; } } for(int j = 0, i < n, ++i) { for(int i = 1, j < n, ++j) { SAT[i][j] += SAT[i-1][j]; } } //Sum of a to b float sum(int a, int b) { return SAT[a-1][b] + SAT[a][b-1] - SAT[a-1][b-1]; }
Moment Shadow Mapping
VSSM Problem: 遮挡物简单情况下,遮挡深度分布非正态/不符合切比雪夫估计 ,估计值不准
- 与实际值相比较暗:视觉无影响
- 与实际值相比较亮:漏光(Light Leaking,工业界也有称Light Bleeding)
解决分布描述不准方法——引入高阶矩(Moments)
- 简单理解为“ \(x^i\) 即 \(x\) 的 \(i\) 阶矩”
- 使用前 \(m\) 阶矩的组合( \(x^1,x^2,\dots,x^m\) )可以描述一个具有 \(m/2\) 个“台阶”的阶跃函数
- 可视为一种展开,将原函数展开为前 \(m\) 阶矩的线性组合
- 在MSM中,前4阶矩可较好描述遮挡深度分布,在使用VSSM的想法计算所需值(可在Blocker Search和PCF环节使用该方法)
Distance Field Soft Shadows
Distance Field / Distance Function: Minimum distance to the closet location on an object SDF(Signed Distance Field) 是较好的混合方式,比线性插值得到结果更平滑连续——[ 最优传输理论 ]
Usages:
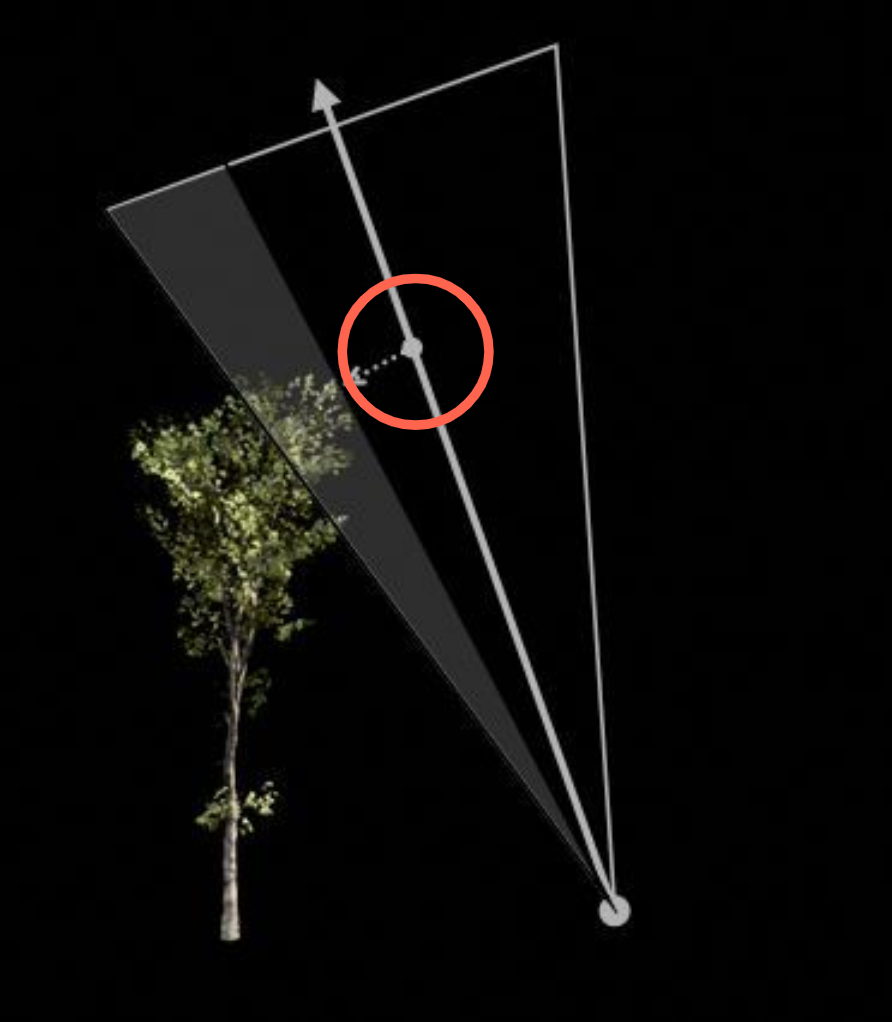
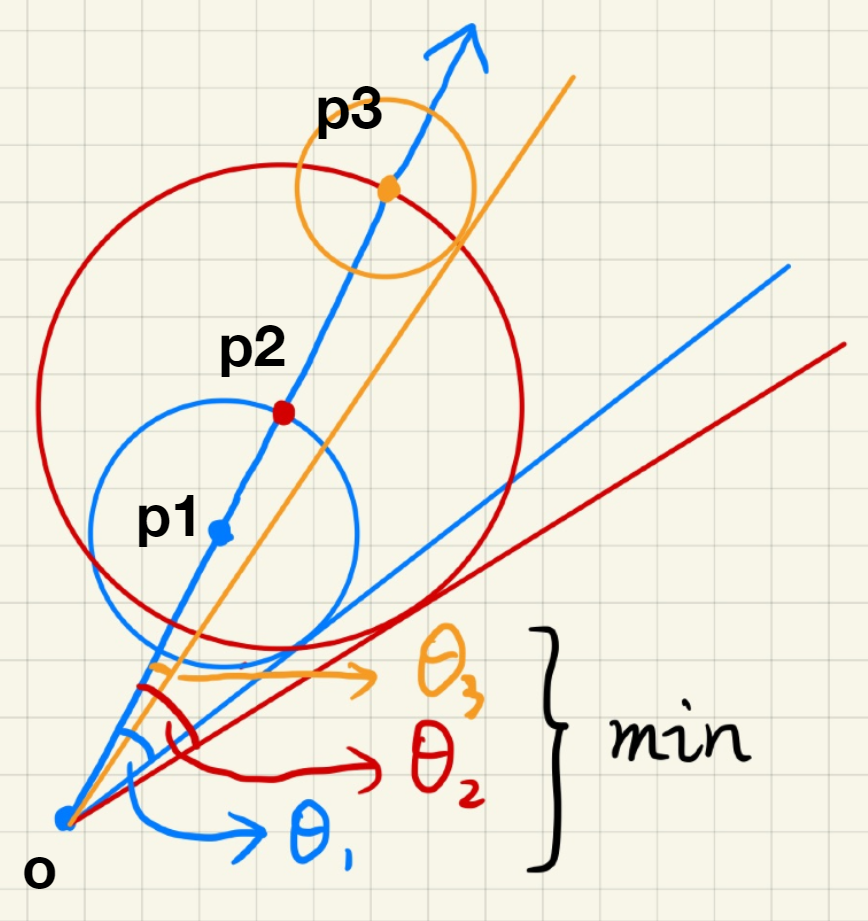
Ray marching (Sphere Tracing) 在某一点,作SDF值(距离物体的最小距离)为半径的球,则球体内任意方向发射光线均不与物体相交,将该半径定义为“安全距离”(safe distance)。则光线可以朝原方向走该半径长度的距离,得到新的点和SDF值,同理迭代。直到沿着同一方向与物体距离足够小,或光线路径过长(认为无物体与之相交)时停止追踪。

Soft Shadows 类Ray Marching,对每一根光线,算出”安全角度”(safe angle)。(光线上所有点的SDF值的最小值为半径,该点为圆心作圆,与光线发射点两条切线的夹角) \(\text{smaller safe angle}\Rightarrow\text{less visibility}\)
 \[
\begin{array}{l}
\displaystyle V=\arcsin\frac{SDF(p)}{\|p-o\|}\quad \arcsin 计算量过大\\
\displaystyle V\approx \min\left\{\frac{k\dot
SDF(p)}{\|p-o\|},1.0\right\}\quad
直接使用比值近似,其中k值决定过渡带宽度,即阴影软硬程度\\
\end{array}
\]
\[
\begin{array}{l}
\displaystyle V=\arcsin\frac{SDF(p)}{\|p-o\|}\quad \arcsin 计算量过大\\
\displaystyle V\approx \min\left\{\frac{k\dot
SDF(p)}{\|p-o\|},1.0\right\}\quad
直接使用比值近似,其中k值决定过渡带宽度,即阴影软硬程度\\
\end{array}
\]优势:快
局限性:SDF的计算量、存储量,以及物体运动后重新计算的复杂度。(对多个物体的SDF,取最小值即可。)and some artifact
misc:利用SDF在实时渲染中生成矢量字符