PS: Lecture17-20主要涉及[机器学习]、[网络架构]、[面向数据编程],与本人图形方向相离较多,故仅浏览学习,暂无笔记
Lecture16 Gameplay Systems - Basic Artificial Intelligence
Navigation
三个步骤:
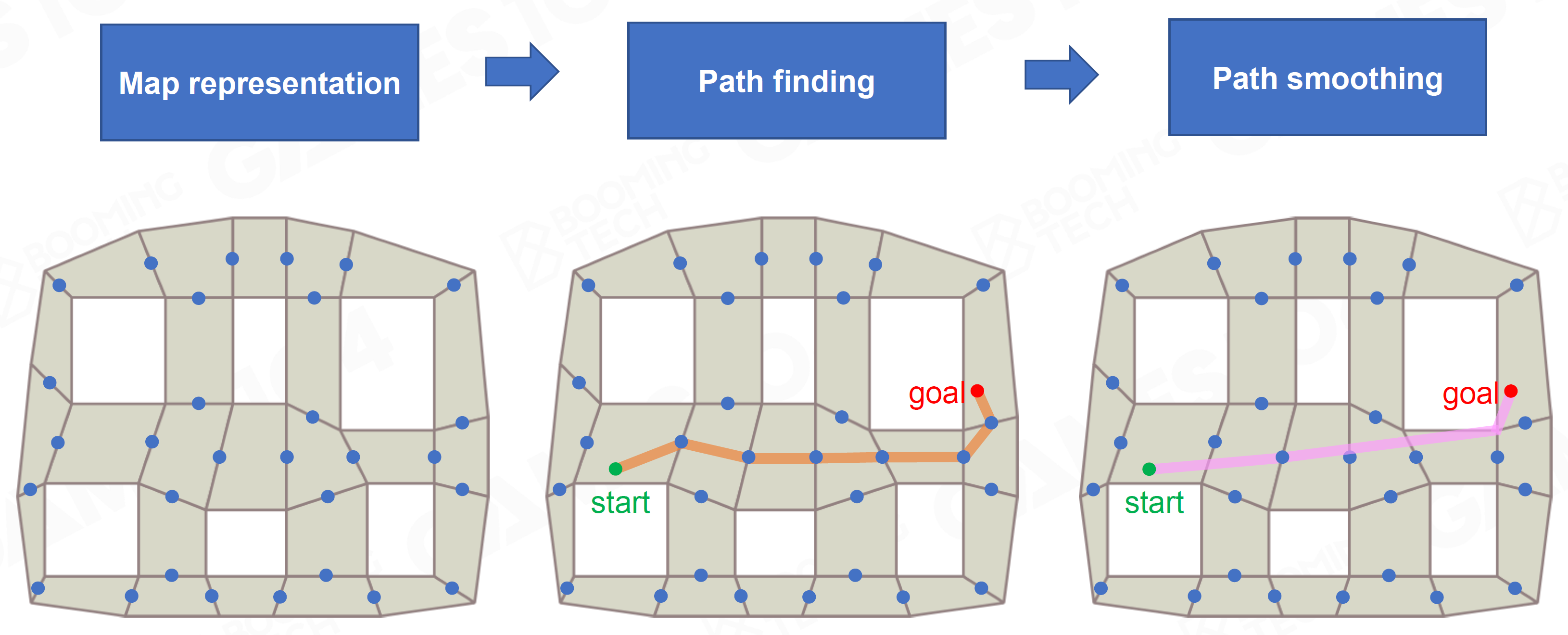
Map Representation 地图表达
Walkable Area
需要考虑:
- Physical Collision
- Climbing Slope/Height
- Jumping Distance
- …
难以完全模拟人的可行路线,需要一定的限制,类似“空气墙”; AI Agents和Player的可行区域相同
Waypoint Network
- 路网,类似地铁线路图
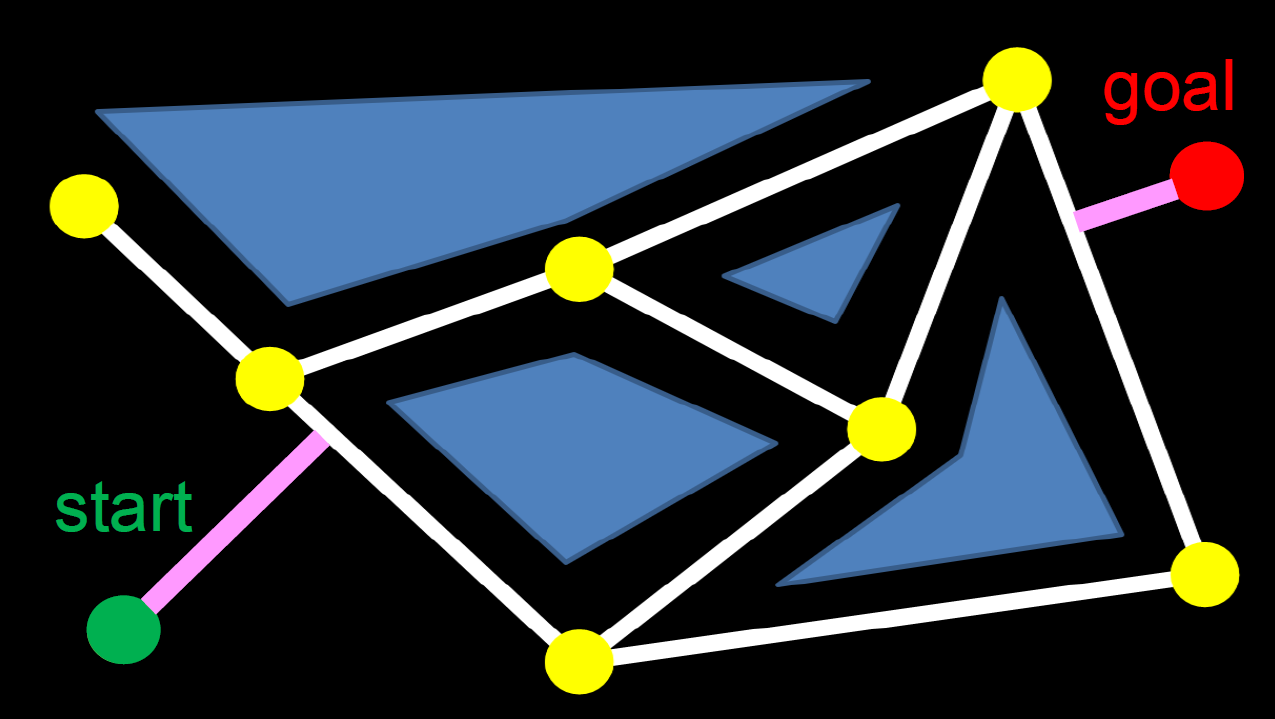
- 寻找最近的路点
- 易于实现,快速寻路不够灵活,路网需要手工标注
- 路网,类似地铁线路图
Grid
- Square / Triangle / Hexagon 其中Square相对易于存储
- 易于实现、均匀数据结构、动态可更新
- 精确性依赖分辨率
- 密集网格降低寻路性能
- 内存消耗大
- 难以处理3D地图(桥梁、隧道等)
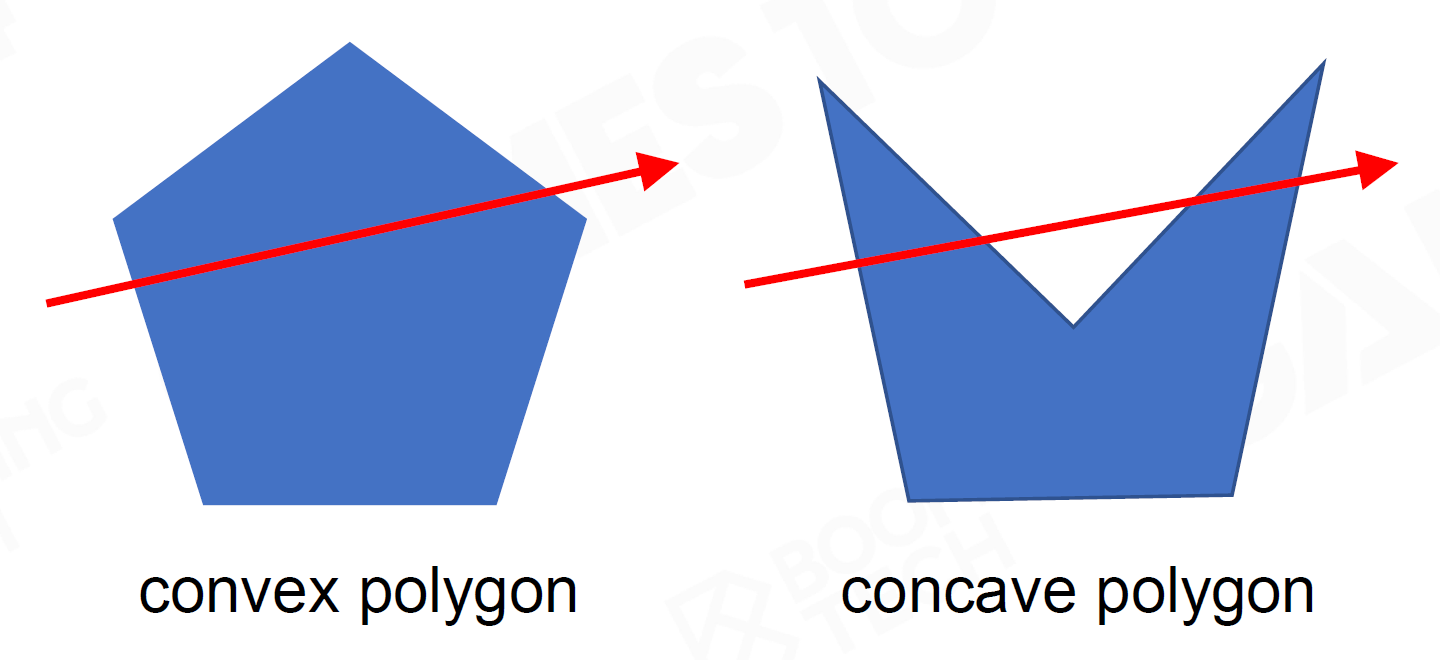
Navigation Mesh
用简化的凸多边形表示场景
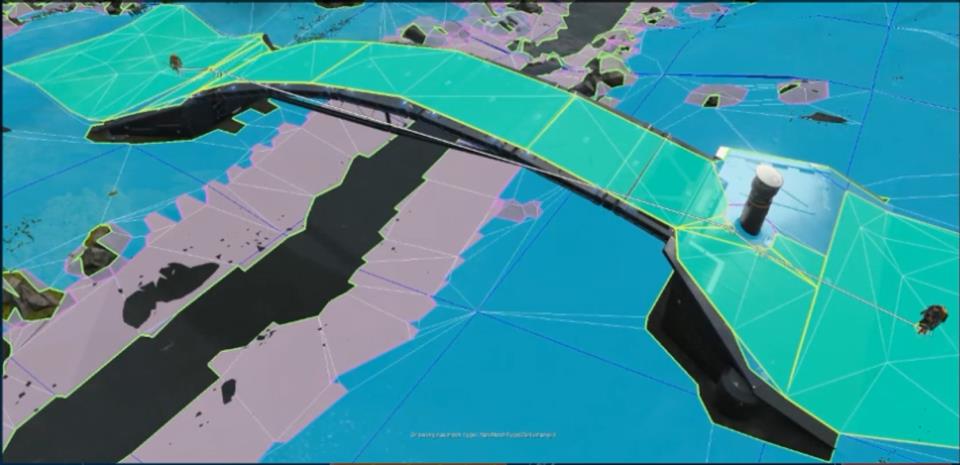
若出现凹多边形,寻路时可能跨越凹边出现在Mesh外区域
优势:
- 支持3D可行区域
- 精确
- 快速寻路
- 灵活选择起始地、目的地
- 动态
缺陷:
- 复杂的生成算法
- 不支持3D空间,例如空中飞行
Sparse Voxel Octree
- 空间八叉树
- 存储量大
- 寻路复杂
Path Finding 寻找路径
所有表达,都可归为图结构
即在图上找到一个路径,尽可能找到最优(短)路径
深度优先搜索 / 广度优先搜索 消耗比较高,广度优先适合找到最短路径
Dijkstra Algorithm
for each vertex v: dist[v] = ∞ prev[v] = none dist[source] = 0 set all vertices to unexplored while destination not explored: v = least - valued unexplored vertex set v to explored for each edge(v, w): if dist[v] +len(v, w) < dist[w]: dist[w] = dist[v] + len(v, w) prev[w] = vA Star (A*) 一种启发式算法,不用精确的最短路径
- 启发函数:预估当前点到终点的距离 \(h(n)\)
- 例如:欧拉距离 / 曼哈顿距离
- \(h(n)\) 的精确性影响性能表现
- 则每一个当前点消耗为 \(f(n)= g(n) + h(n)\)
- 优先搜索 \(f(n)\) 最小的情况
- 走到终点就停止,不追求完全最短
- 启发函数:预估当前点到终点的距离 \(h(n)\)
Path Smoothing 路径平滑
- Funnel Algorithm
- “走路时看前面”
- 当前点和所在三角形两端点组成一个扇形(漏斗,Funnel),下一个目标点是否在扇形中,来决定行走路线
- 寻找扇形两端点比较复杂
NavMesh Generation
- 先将整个场景体素化
- Region Segmentation
- 寻找Edge Voxel,生成Distance Field,找到区块的中心区域(离Edge最远的)
- ”洪水“算法,类似Voroni算法,找到空间划分
- 处理Overlap问题
- 生成分割区域,凸多边形
- 可以为不同的凸多边形打上不同的标记 Polygon Flag
- AI寻路逻辑
- AI移动速度
- …
Advanced Features
- 基于Tile的分区域NavMesh,易于更新
- Off-Mesh Link建立不同Mesh之间的连接,手动,实现攀爬等动作
Steering 转向系统
寻路中,车辆无法严格执行路径(受到物理限制),需要转向系统
- Seek / Flee 追着目标点
- Pursue 追踪
- Path Following
- Wander
- Flow Field Following 方向场
- Velocity Match
- 目标点速度,反向算每步加速度
- Align 保证朝向一致
- 目标点角速度,反向算每步角加速度
Crowd Simulation 群集模拟
参考《基于物理的动画-粒子系统》
- “Boids”
- 三种力
- Separation
- Cohesion
- Alignment
- 行人,沿着一定的Line运动
- 避障、避免碰撞
- 对每个个体做寻路消耗非常大 —— Distance Field
Velocity-based Models
- 核心想法:个体相遇时,产生速度的障碍,调整速度
- Reciprocal Velocity Obstacle
- 两个以上个体相遇时产生冲突,如何优化? Optimal Reciprocal Collision Avoidance
- 结果最优,但开销大,根据需求自主选择(基于力的方式效果较差但开销小)
Sensing or Perception
- AI所获得的信息
- 内部:位置、HP、子弹、Buff等
- 外部:
- 静态空间信息
- Navigation Data
- Tactical Map 战术地图(更具有战术价值的位置)
- Smart Object eg.可打破的墙等
- Cover Point 掩体点
- …
- 动态空间信息
- Influence Map 战场态势感知的热力图,避开危险系数高的区域
- Navigation Data上更新的标记
- Sight Area 视野区域
- …
- Game Object
- 静态空间信息
- Sensing Simulation 模仿人类的感知
- 考虑开销
- 共享Influence Map等方式
- 引擎侧提供充足的接口和自定义性
Classic Decision Making Algorithms
- Finite State Machine
- Behavior Tree
- Hierarchical Tasks Network
- Goal Oriented Action Planning
- Monte Carlo Tree Search
- Deep Learning
Finite State Machine
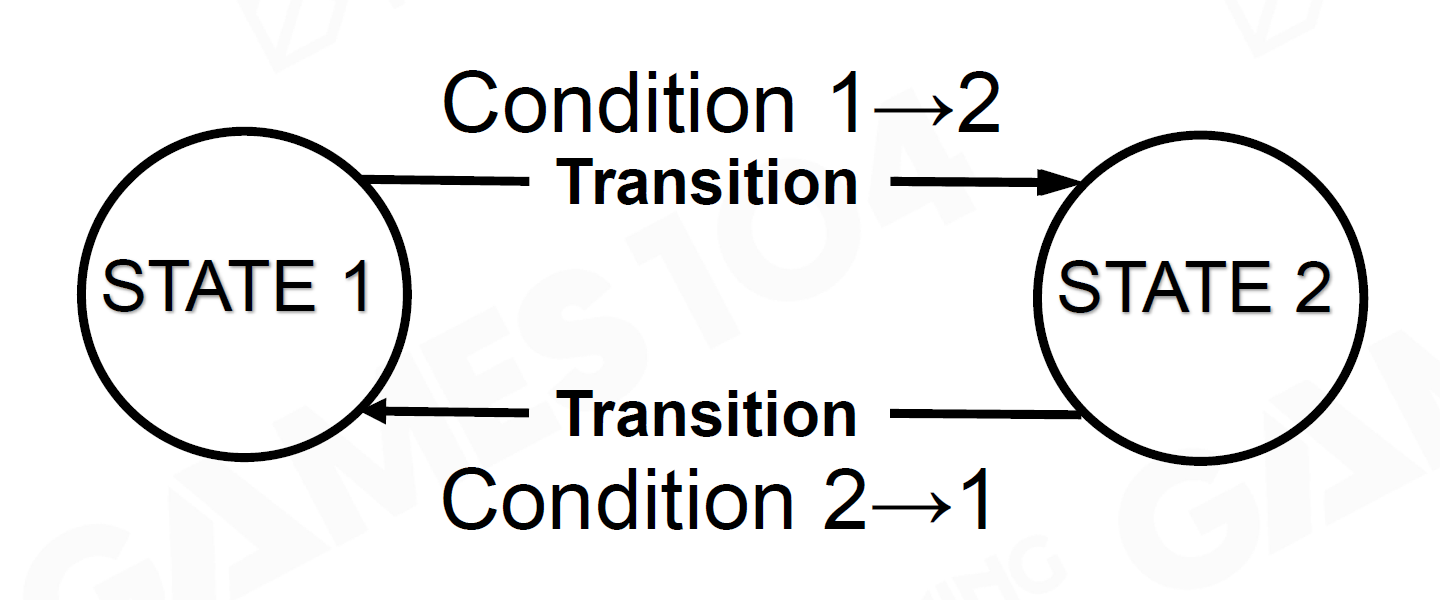
- State
- Transition
- Condition
- 问题:
- 复杂情形下State过于多,网络过于复杂
- 解决方法:Hierarchical Finite State Machine
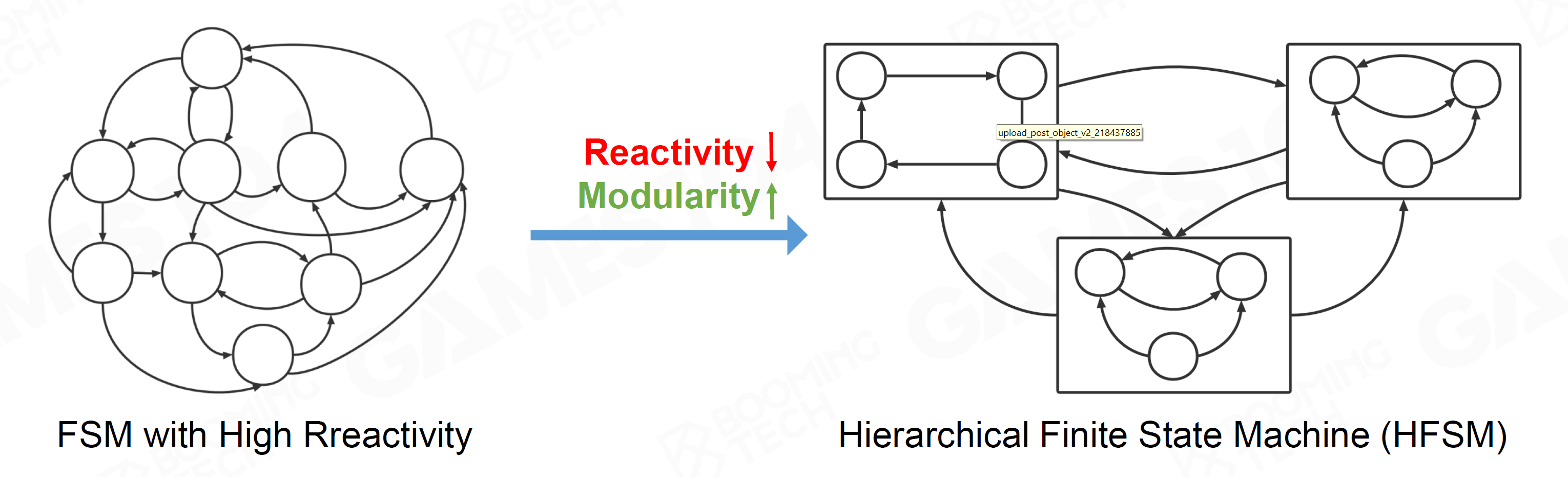 子状态之间切换变得复杂
子状态之间切换变得复杂
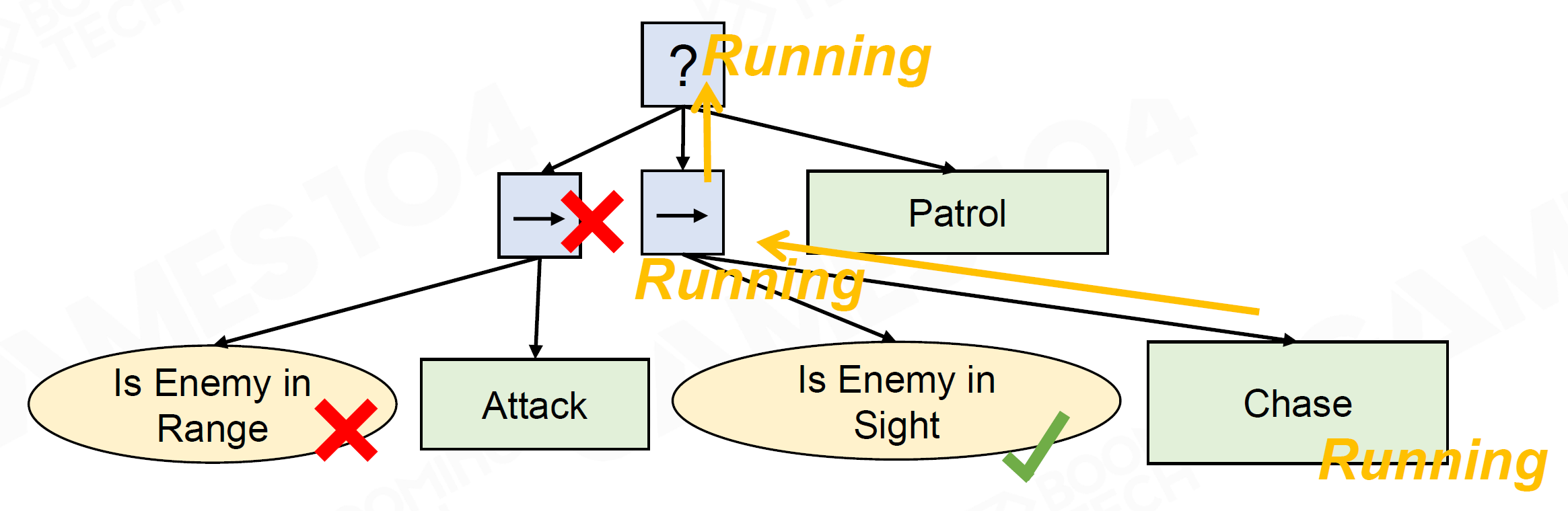
Behavior Tree
- 状态机是对AI逻辑的抽象,并不符合人的知觉系统
- 将AI的行为Pattern从状态机的“飞线”转换为更符合人的决策树结构
- Execution Node 执行节点(叶子节点):
- Condition Node 条件节点
- Action Node 动作节点 三种状态:
- Success
- Failure
- Running
- Control Node
- Sequence 依次执行
- Selector
按优先级选择执行:A不行执行B,B不行执行C,有一个可执行就继续执行下去
- Parallel 并行执行
- Decorator 修饰器,例如增加延时等
- 如何Tick行为树?
- 每一次从根节点开始Tick,防止动作保持在某一叶子节点
- 行为树同时在Running的节点不一定只有一个
- Blackboard 记录环境变量,环境信息,与Gameplay交换信息的介质
- 缺点:Tick的消耗较大
Upcoming: AI Planning and Goals
上述提到的AI方法,均为条件-执行逻辑,AI是没有计划和目的的,期待下一课…