Lecture21 Dynamic Global Illumination and Lumen
Part I Dynamic Global Illumination
Global Illumination - 略
Reflective Shadow Maps, RSM - 略
低分辨率间接光照加速:
- 计算低分辨率间接光照
- 对全分辨率图像的每个像素
- 获得周围四个低分辨率采样
- 通过法线和世界坐标位置判断,采样间差异过大时剔除
- 双线性插值
- 以全分辨率重新计算剔除的像素
Light Propagation Volumes, LPV - 略
Sparse Voxel Octree for Real-time Global Illumination, SVOGI
如何组织voxel的分布?
- 硬件保守光栅化:对很小的三角形,保证其至少有一个voxel
- 八叉树存储
- Shading with Cone Tracing in Voxel Tree
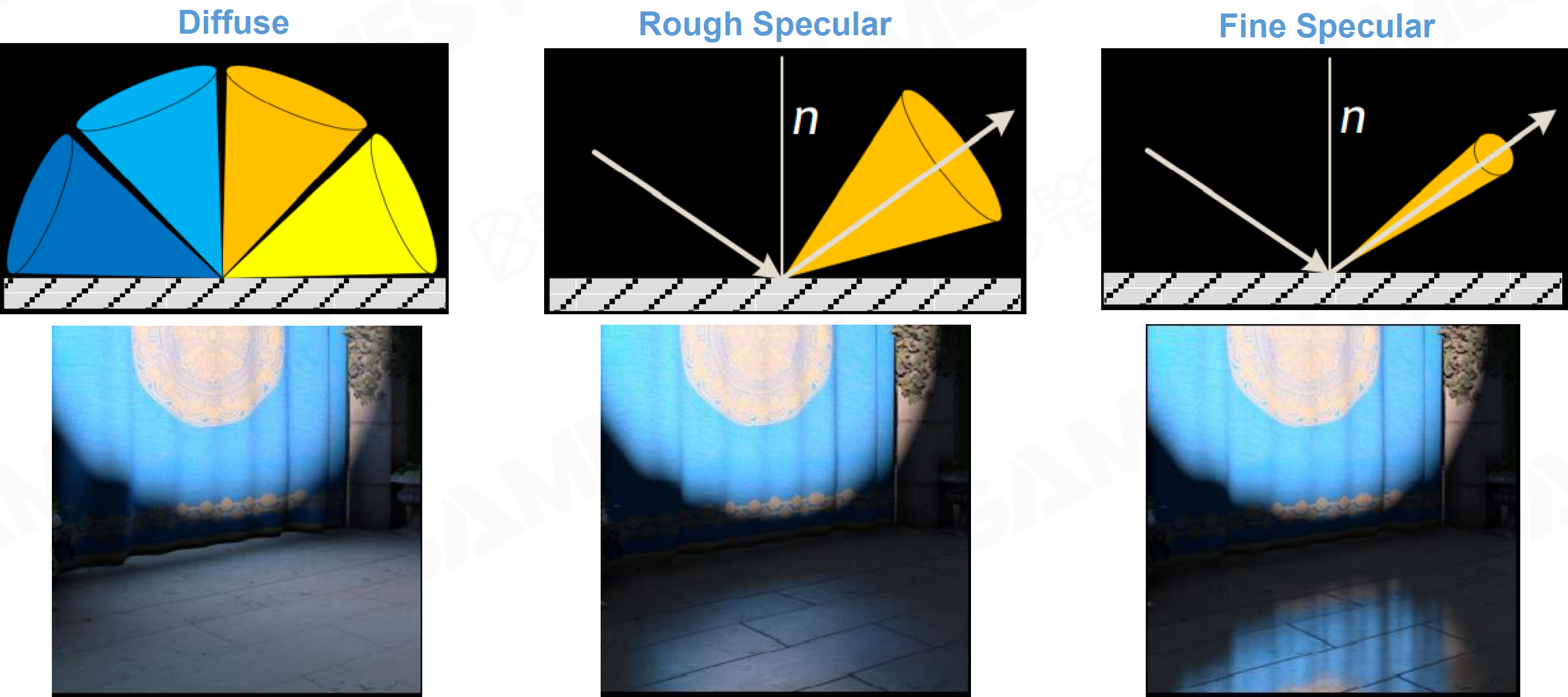
- 着色点根据BRDF发射Diffuse和Specular的Cone
- 根据Cone尺寸查询树结构获取光照 - 非常适合Hierarchy结构存储的光照数据
- NVIDIA的工作,GPU表达非常复杂
Voxelization Based Global Illumination, VXGI
- 更关注相机视锥内的区域、更关注近处的区域
- Clipmap,voxel版的Mipmap
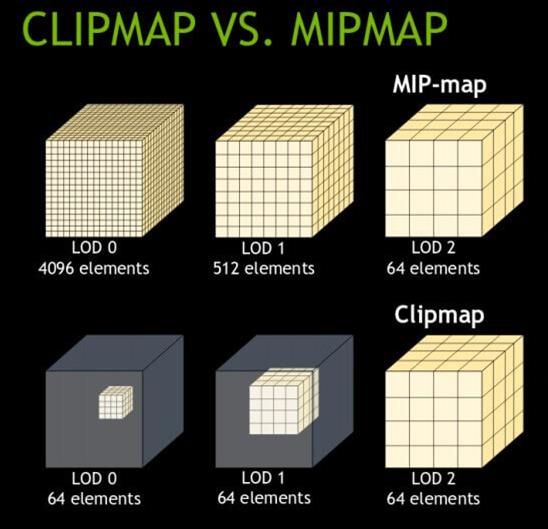 利用Clipmaps存储voxel数据
利用Clipmaps存储voxel数据
- 重心区域使用更高分辨率voxel
- 更适合Cone Tracing
- 重心区域使用更高分辨率voxel
- 建构简单、读取简单、GPU Friendly…
- Voxel Update:空间网格位置固定,只需要更新相机周围的Voxel
- Voxel具有Opacity(透明度),表征Voxel内有多少Surface可以阻挡光线,需要计算三个方向
- 对屏幕空间每个像素做Cone Tracing(Diffuse、Rough Specular、Fine
Specular)
- 问题:
- 错误的遮挡关系,简单使用Opacity来表示
- Light Leaking:遮挡物薄于Voxel时
Screen Space Global Illumination, SSGI
- Reuse screen space data <- Screen Space Reflection, SSR
- SSR:单根光线,构建反射 -> 多方向多根光线,构建GI
- 对Depth Buffer做Raymarching,Hierarchical Tracing 参考SSR笔记
- Reuse近邻像素
- 做Cone Tracing,相当于对Tracing到的屏幕范围的像素做一次Filtering
- 优势:快,质量高,没有遮挡问题
- 问题:缺少屏外信息,重用近邻像素带来的错误Visibility
- 独特优势:
- 易于处理非常近的接近阴影
- 准确的Hit点计算
- 对场景复杂度不敏感
- 可以处理动态物体
Part II Lumen
Real-time Ray Tracing的问题:
- 1/2 ray per pixel
- Sampling
Idea:低分辨率的屏幕空间的Probe,采样简介光照
Phase 1 : Fast Ray Trace in Any Hardware
Signed Distance Function, SDF
- Per-Mesh SDF 对每个Mesh构建SDF,所有SDF组合成场景
- 对于薄于SDF分辨率的Mesh,将其加厚
- Ray Tracing with SDF
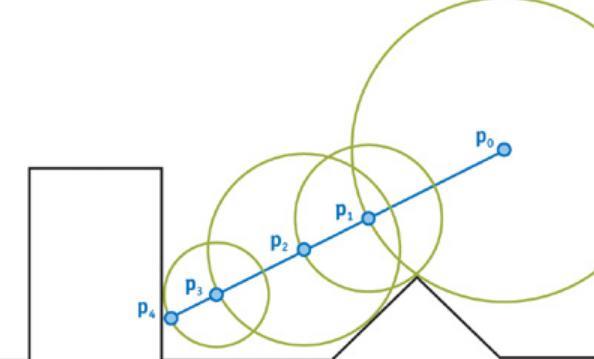
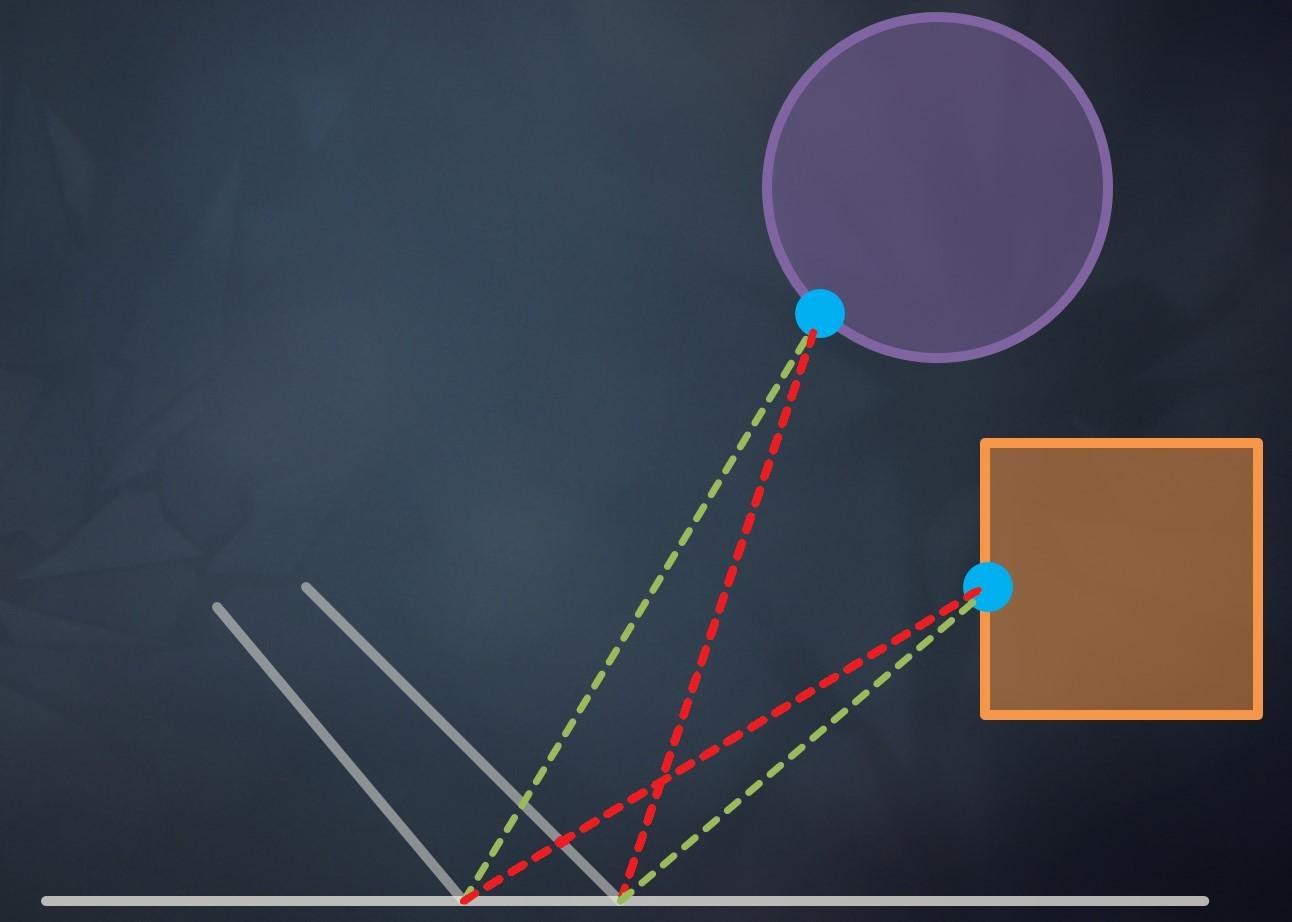
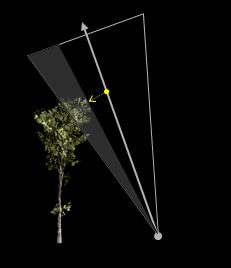
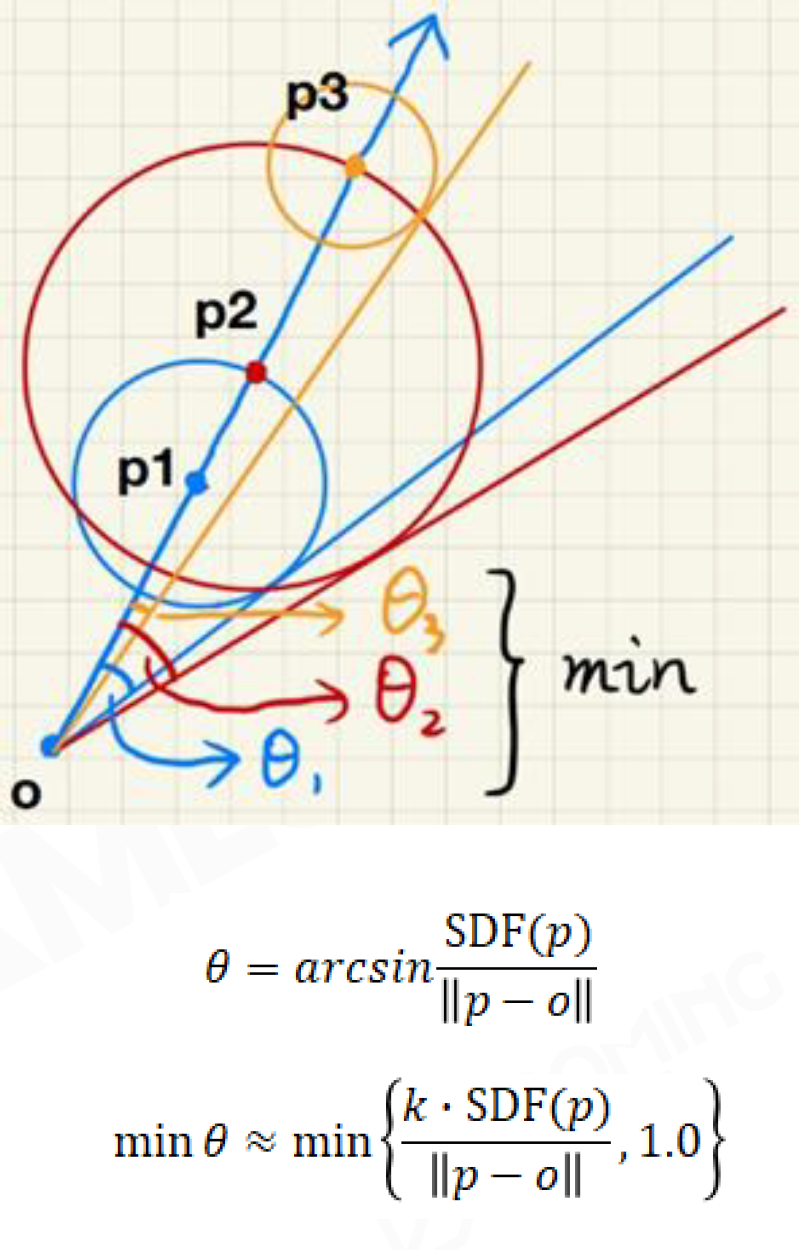
- Cone Tracing with SDF (eg. SDF Soft Shadow)
- 对SDF稀疏化存储,但可能导致Raymarch迭代步长变长
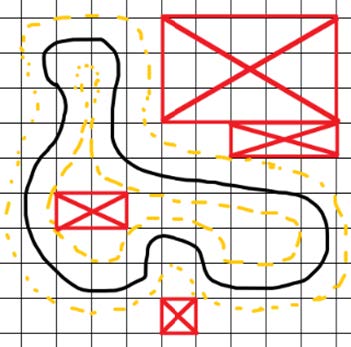
- 对SDF做LoD
- SDF可导,导数为法线方向
- 可以根据相机远近方便地切换SDF分辨率
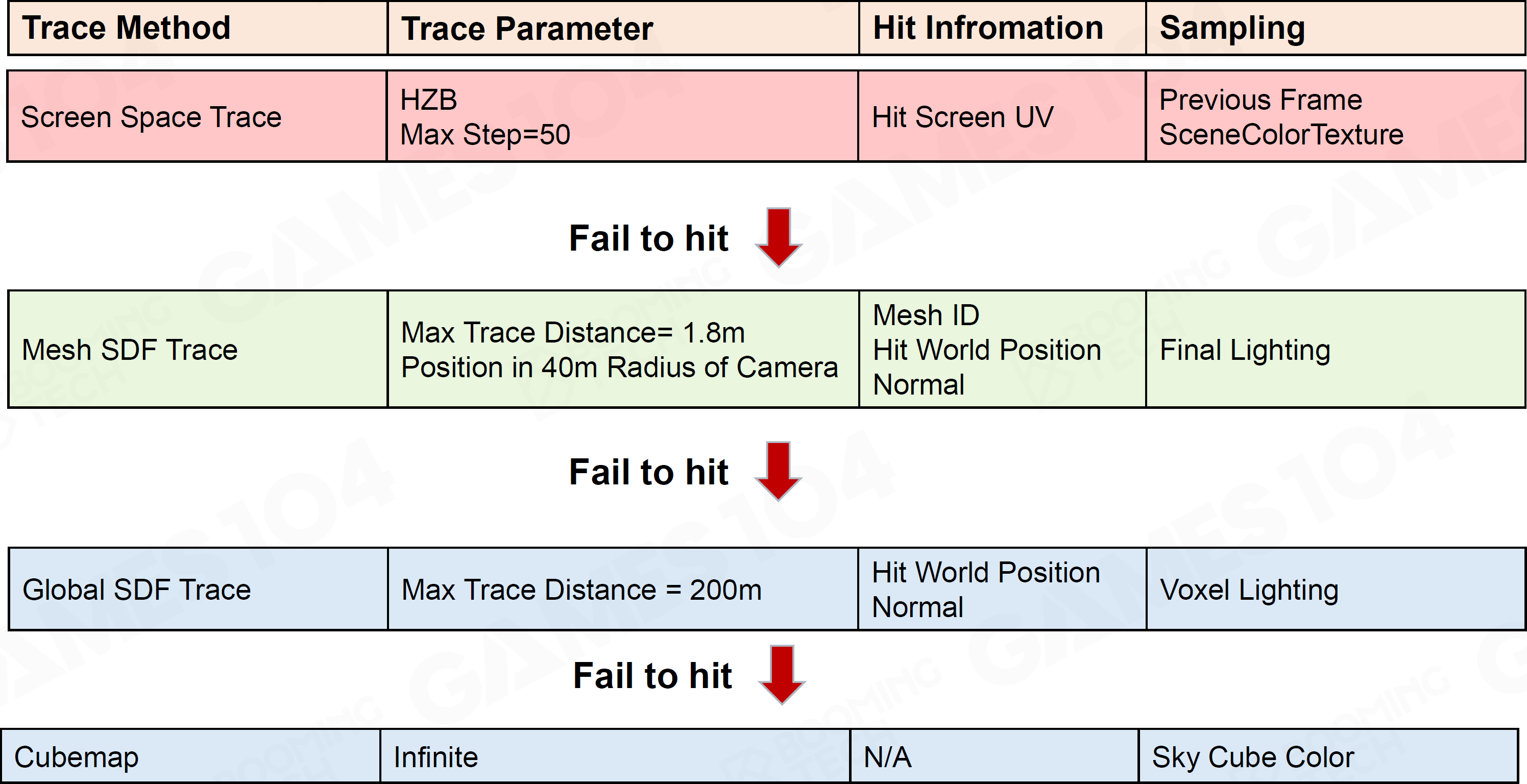
从Mesh SDF合成低分辨率的场景的Global SDF
- 场景Tracing非常快
- 精度相对低
- 在Lumen中结合对Global SDF的Tracing和对Mesh SDF的Tracing
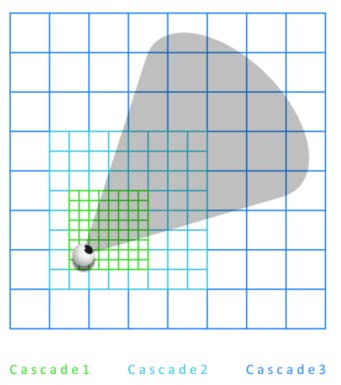
- 4 Clipmaps Global SDF, 根据相机距离
Phase 2 : Radiance Injection and Caching
Mesh Card
- 为场景中的Mesh“拍快照”,对六个面采样

- 对场景以AABB方式生成
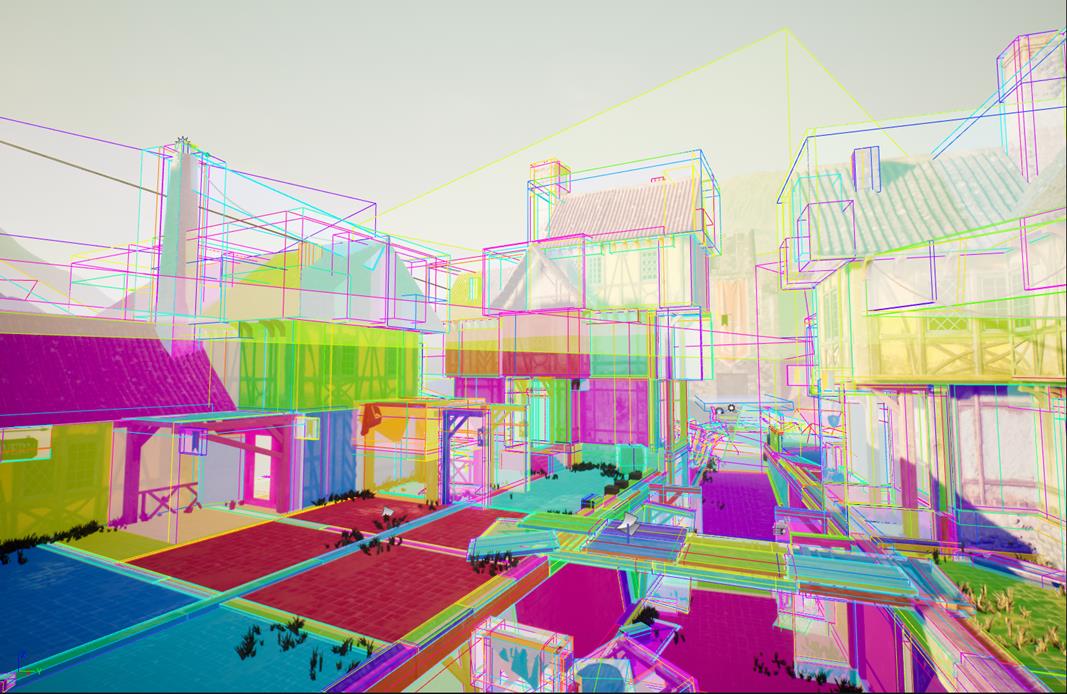
- 对每个Card,存储其六个面的:
- Albedo
- Normal
- Depth
- Emissive
- …
- 根据物体大小、相机远近,对Card应用不同的分辨率
Surface Cache
- 从Mesh Card生成Surface Cache
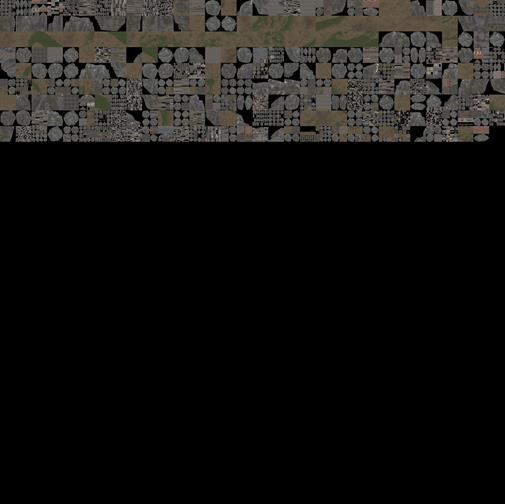
- Pass 1 : Card capture
- Pass 2 : Copy cards to Surface Cache and compress
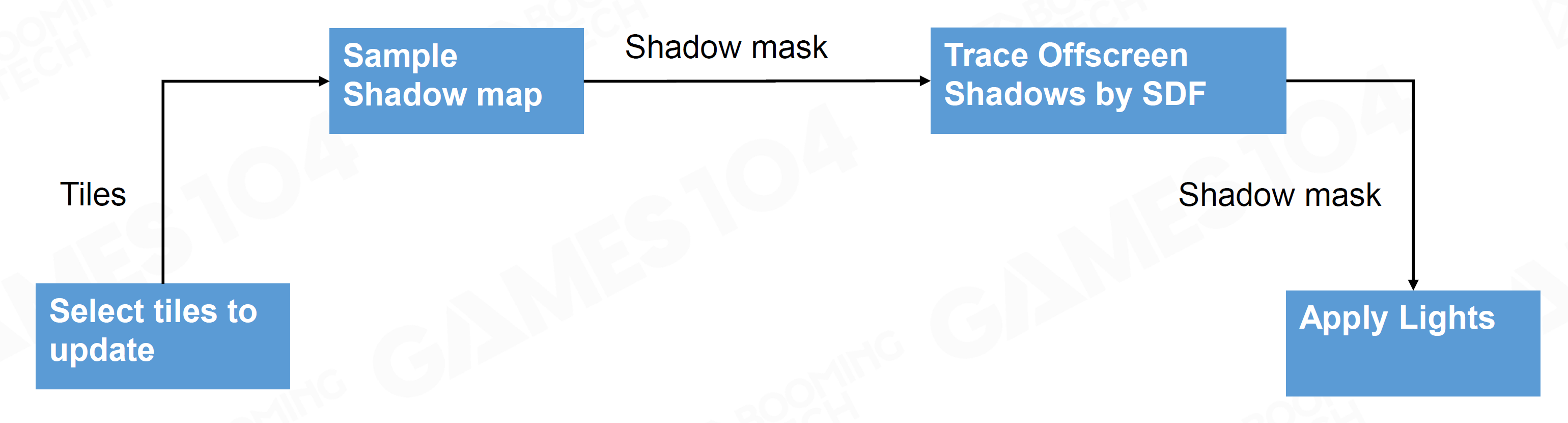
- “Freeze” lighting on Surface Cache
- Surface Cache上的像素是否在阴影中? 如何处理多次Bounce?
- Lighting Cache Pipeline 最终生成Surface Cache Final
Lighting
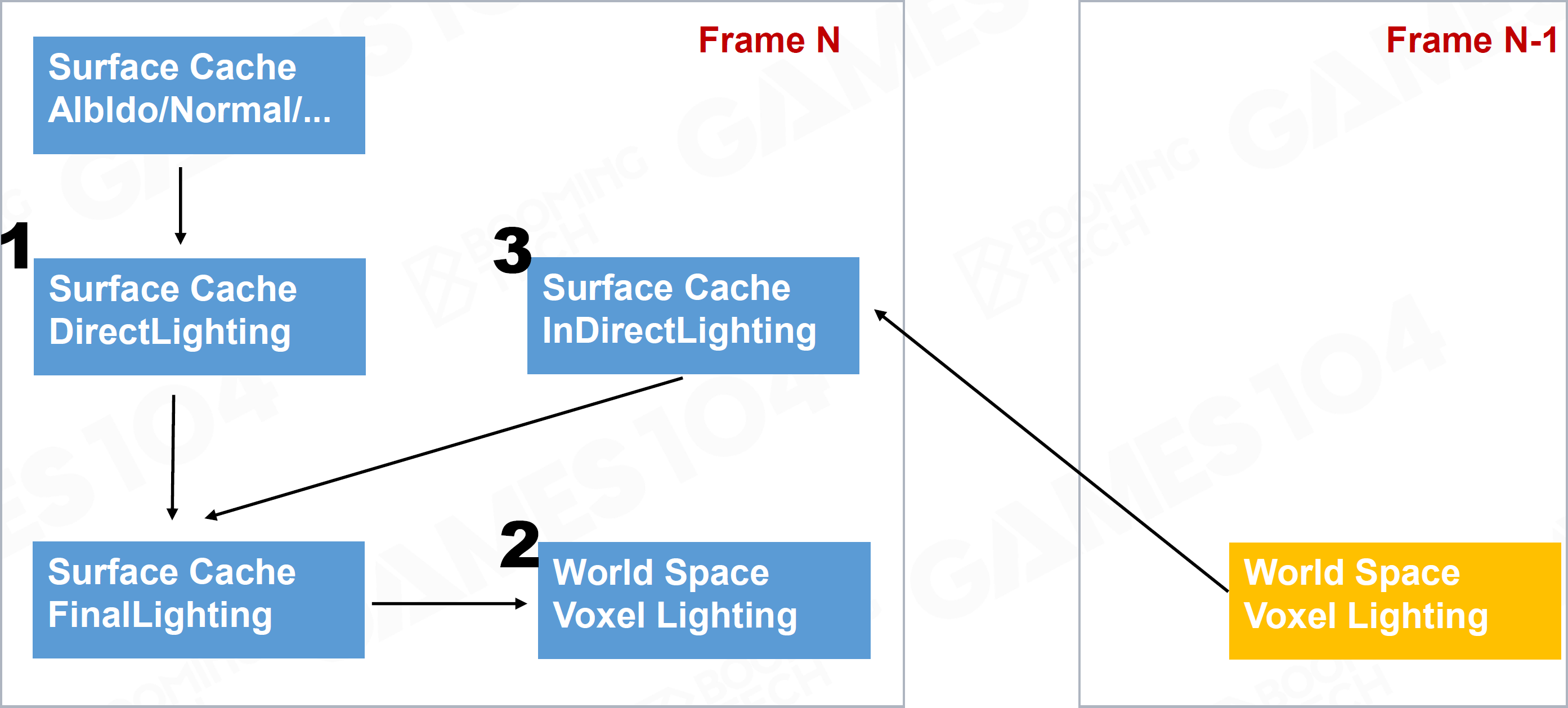 计算当前帧的一次Bounce,利用前一帧的一次Bounce作为次级光源照亮场景,则相当于二次Bounce,依次累计,相当于同一场景下Bounce越积越多(Temporal思路)
计算当前帧的一次Bounce,利用前一帧的一次Bounce作为次级光源照亮场景,则相当于二次Bounce,依次累计,相当于同一场景下Bounce越积越多(Temporal思路) - 1. Direct Lighting
- 直接累加多光源
- 对近处物体,直接取得精确的Instance,从Surface Cache上计算光照
- 对远处物体,因为Global SDF无法标记具体Instance,则对全场景光照做Voxelize表达,建构Clipmaps,对每个Voxel存储六个面的光照
- 2. World Space Voxel Lighting
- 由Final Lighting照亮计算得到的Voxel光照存储,用于下一帧的间接光照计算
- 与后面会提到的Light Probe区分:只存储Voxel六个面的亮度(被照亮的亮度)
- 3. Surface Cache Indirect Lighting
- Light Probe
- 用SH存储间接光照,方便做插值
- Combine Lighting FinalLighting = (DirectLighting + InDirectLighting) * Diffuse_Lambert(Albedo) + Emissive
- 光照更新策略,保障性能开销稳定
- 固定的更新预算
- 桶排序更新优先级
Phase 3 : Build a lot of Probes with Different Kinds
Screen Space Probe
- 只在Screen Space分布Probe,每16*16像素一个
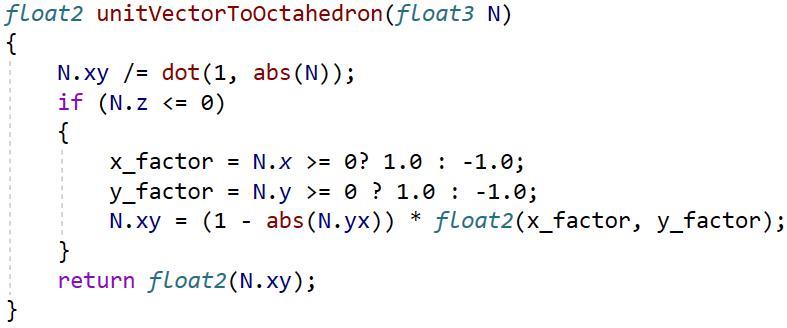
- Octahedron Mapping,使用8*8的Texture存储Probe
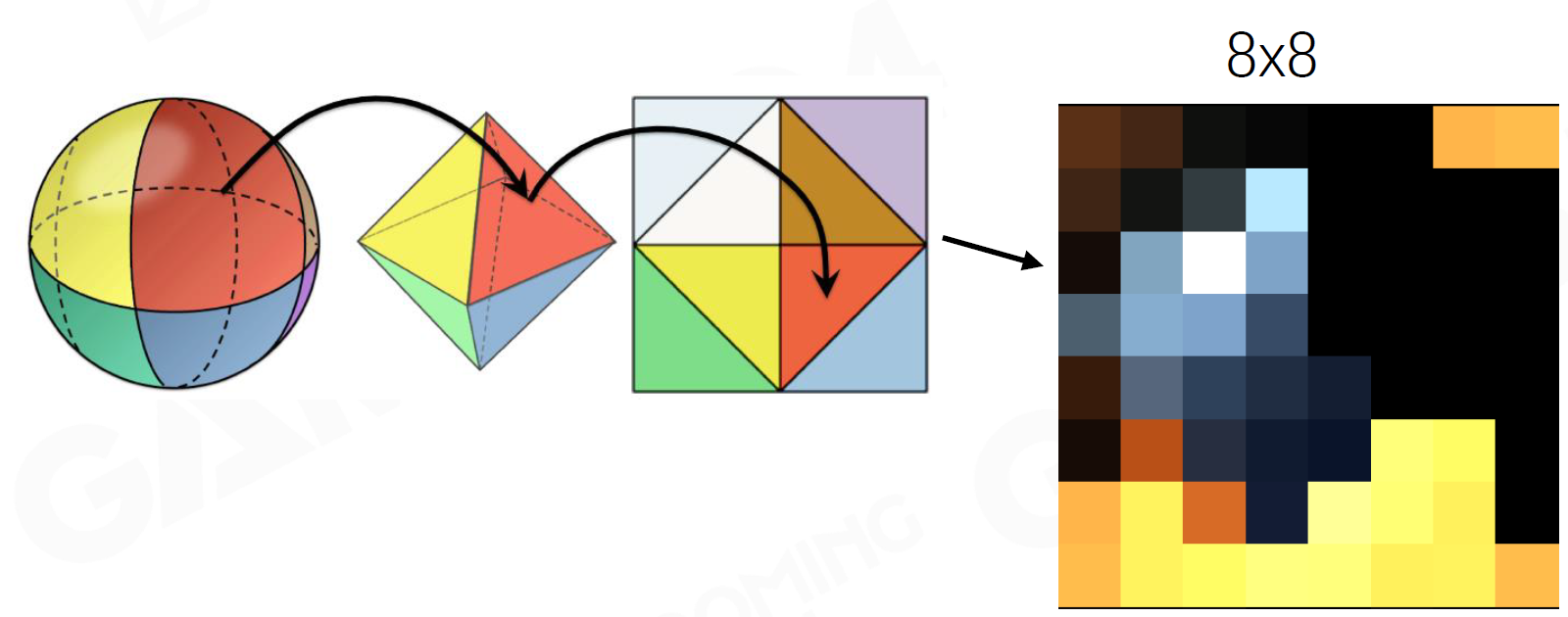
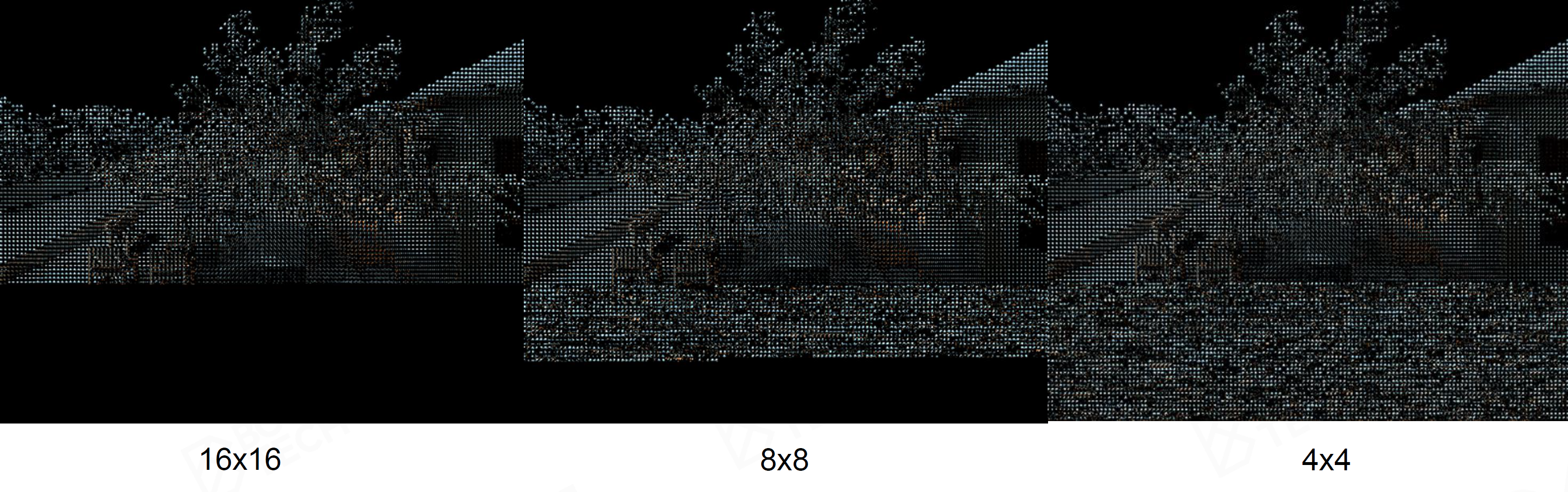
- 对于高频细节部分,进一步细化增加Probe,至8*8或4*4每个
- 判定是否需要增加Probe
- Probe之间很近、着色点之间实际距离较远时(深度差异过大)
- 取一些着色点,邻近四个Probe作着色点法平面投影,投影距离的权重超出阈值时,判定为无效采样,增加Probe
- Screen Probe Atlas
 依次往下存储,因此不会造成过多额外开销
依次往下存储,因此不会造成过多额外开销
- 判定是否需要增加Probe
Importance Sampling
蒙特卡罗采样: \[ \lim_{N\to\infty}\dfrac{1}{N}\sum_{k=1}^{N}\dfrac{L_i(l)f_s(l\to v)\cos(\theta l)}{P_k} \] 重要性采样即取 \(P_k\) 使其尽可能符合分子分布
- 对光源:尽可能符合 \(L_i\) 分布
- 对BRDF:尽可能符合 \(f_s\) 分布
对光源做重要性采样,如何估计光源
- 利用前一帧的光照数据
- 对前一帧邻近四个Probe的Radiance做插值
- 若邻近Probe被遮挡则fallback到世界空间Probe
- 得到插值后8*8的光照分布,作为Light PDF
对BRDF的法线分布做重要性采样
- 法线分布不能用高频的着色点Normal指代
- 在32*32范围内取64点采样,保证深度权重的情况下,将每个Normal的SH累加得到法线分布,作为BRDF PDF
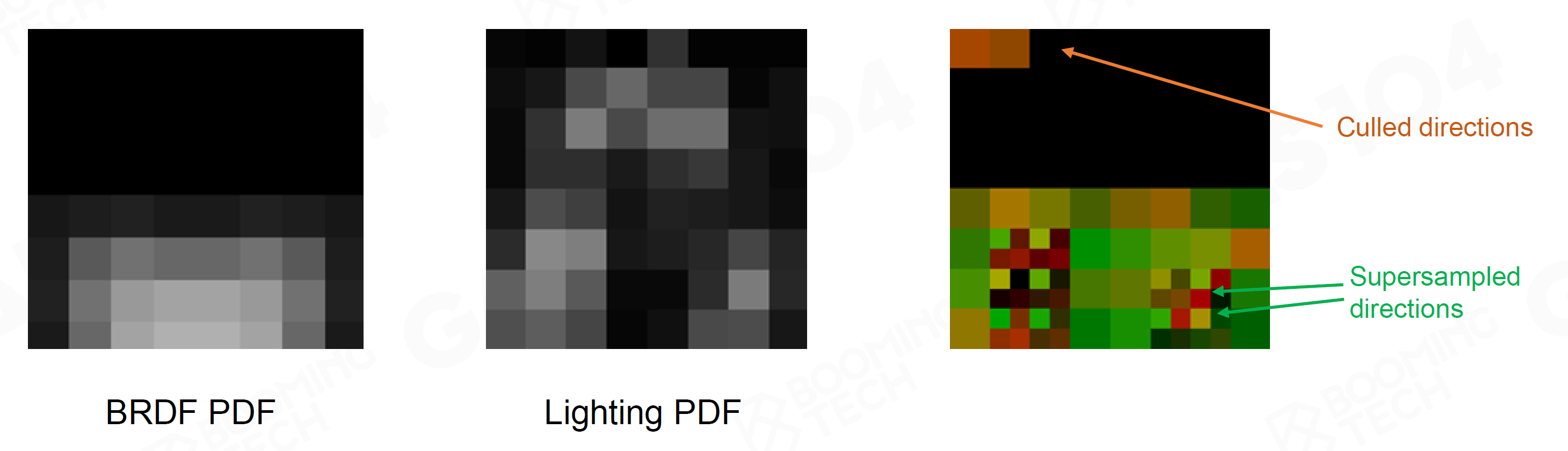
Structured Importance Sampling
- 每个Probe采样64根ray
- 将BRDF PDF与Lighting PDF卷积,得到重要的采样方向
- 对重要的方向做Supersampling,对不重要的方向忽略
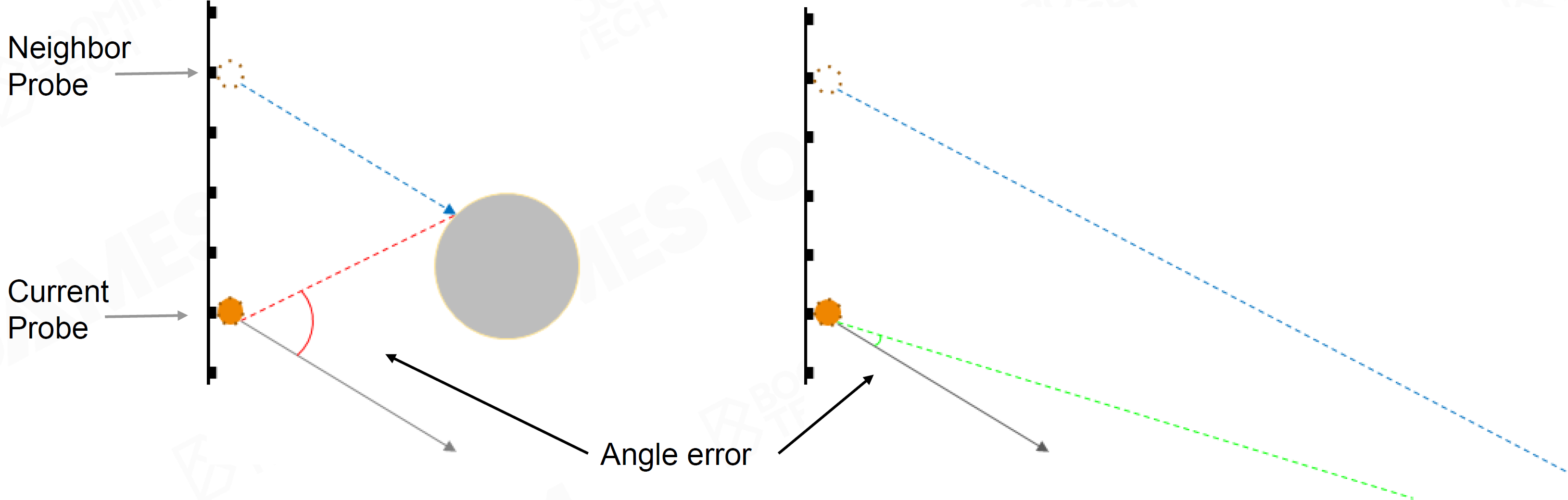
Denoising and Spatial Probe Filtering
- 取Probe周围3*3,做filtering
- 但不同Probe的ray方向不同时,差异过大 ->
判断,若邻近Probe的ray着色点与当前Probe连线,与当前ray角度差大于阈值(10°)时则丢弃不用
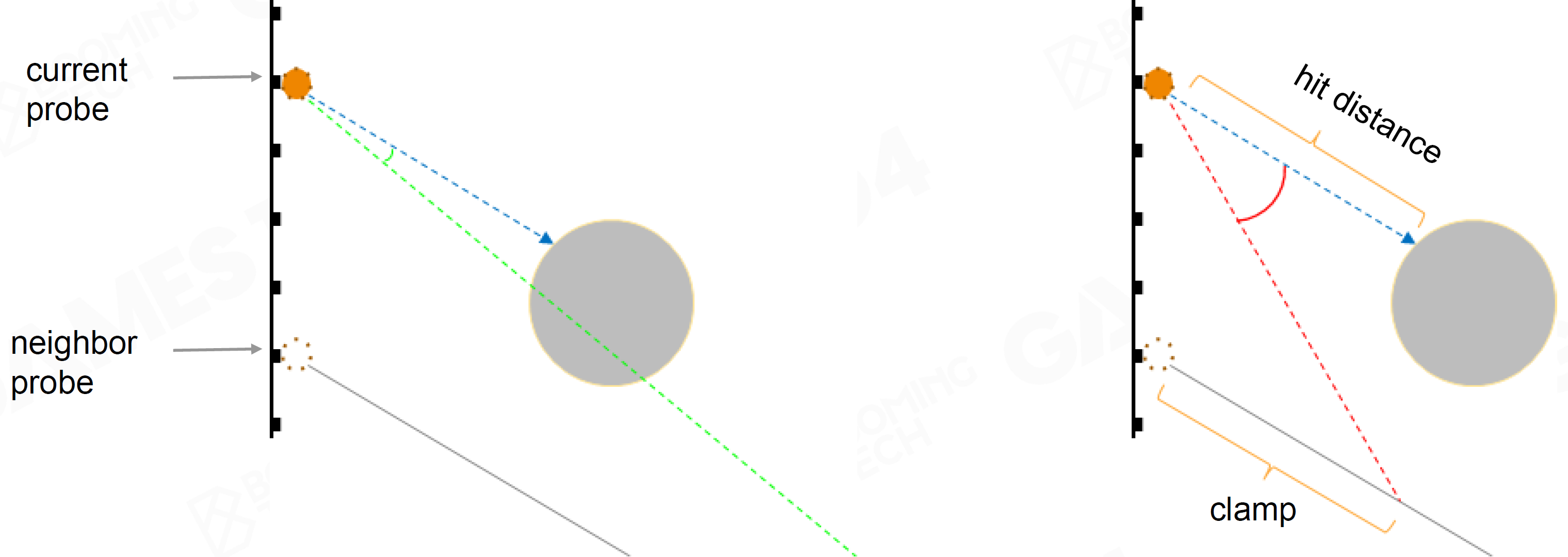
- 邻近Probe的ray方向接近时,但Hit点差异过大 -> Clamp ray深度
World Space Radiance Cache
- Screen Space Probe采样较近的物体
- World Space预先放置Probe,记录远处光照,Screen
Space在采样远处时直接读取World Space Probe
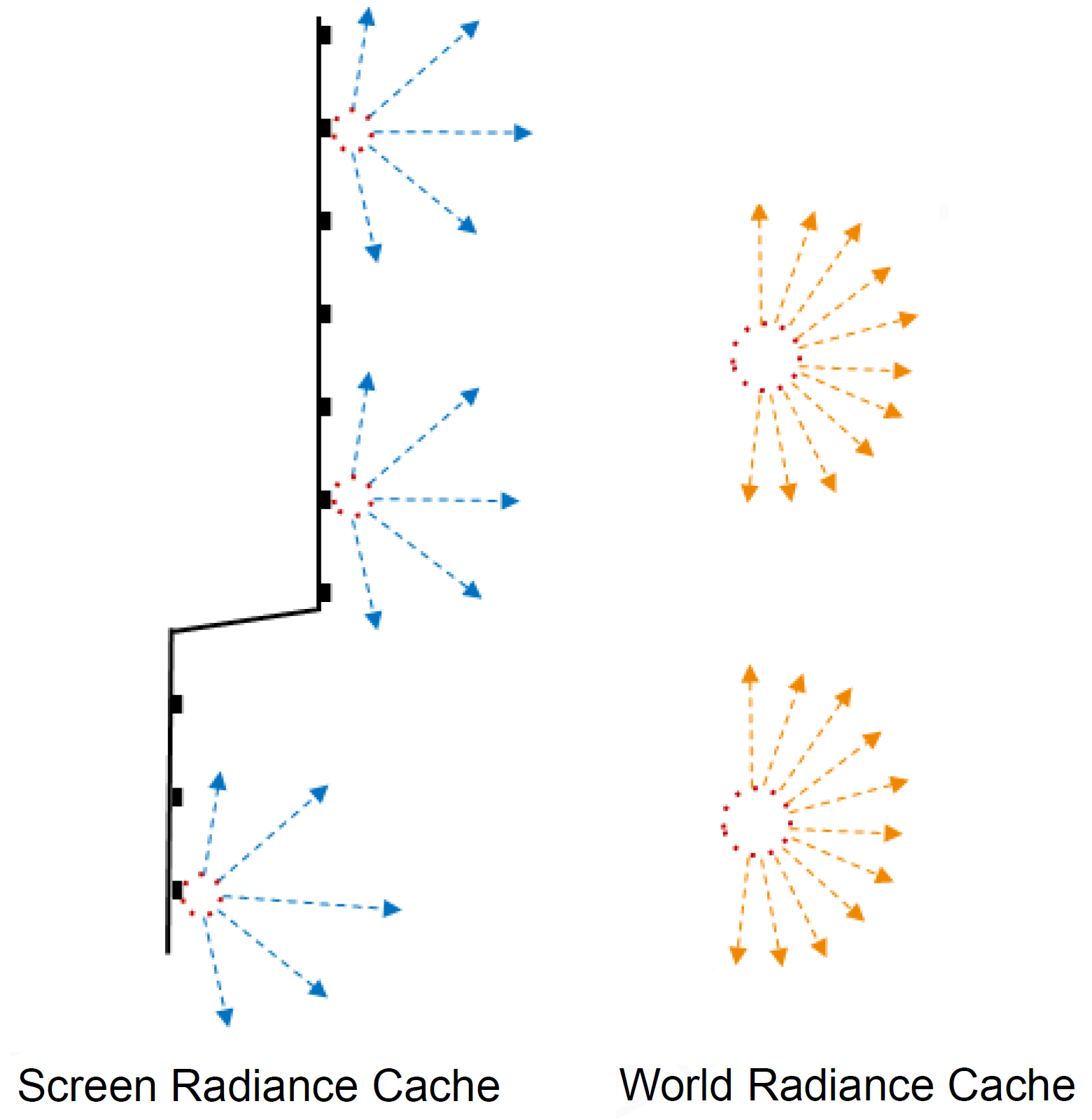
- Clipmaps存储,分布分辨率48*48*48,每个Probe Atlas分辨率32*32
- 连接Screen Space Probe和World Space Probe的ray
- 取Screen Space Probe邻近8个World Space Probe,距离权重插值。
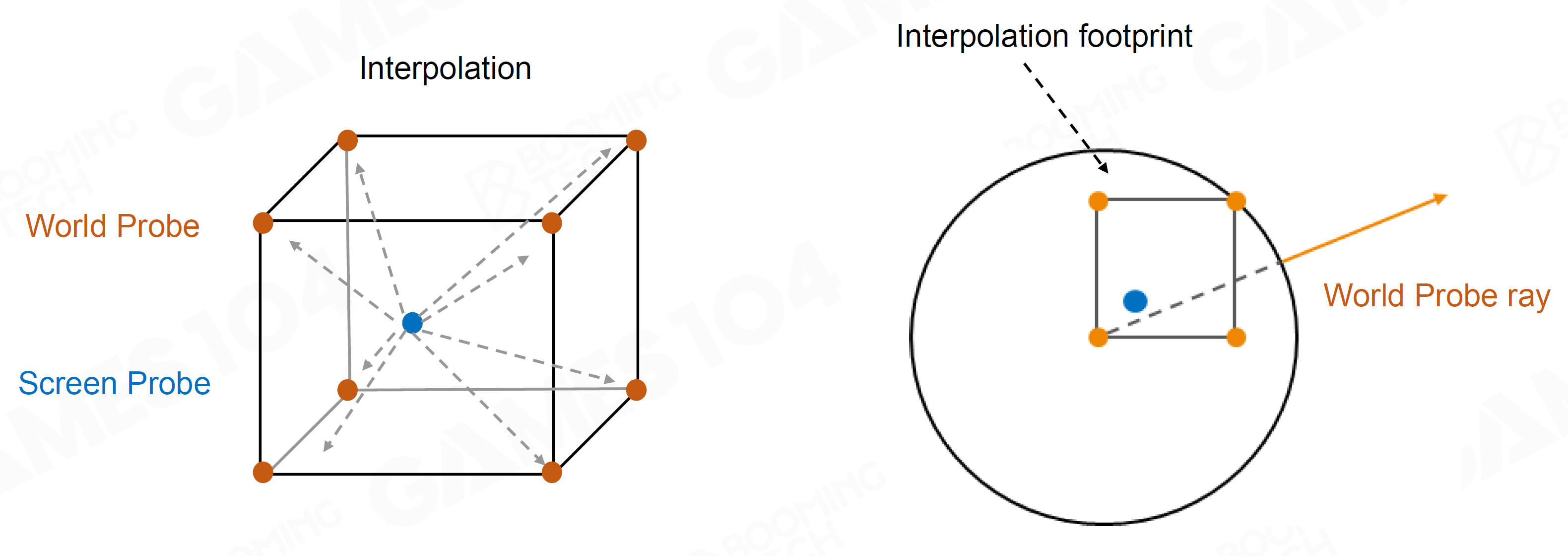 (Cube半径两倍范围内已采样,向更远处raycast时可以skip这段距离)
(Cube半径两倍范围内已采样,向更远处raycast时可以skip这段距离) - 插值后产生与原方向的偏差,跳过遮挡物,产生漏光
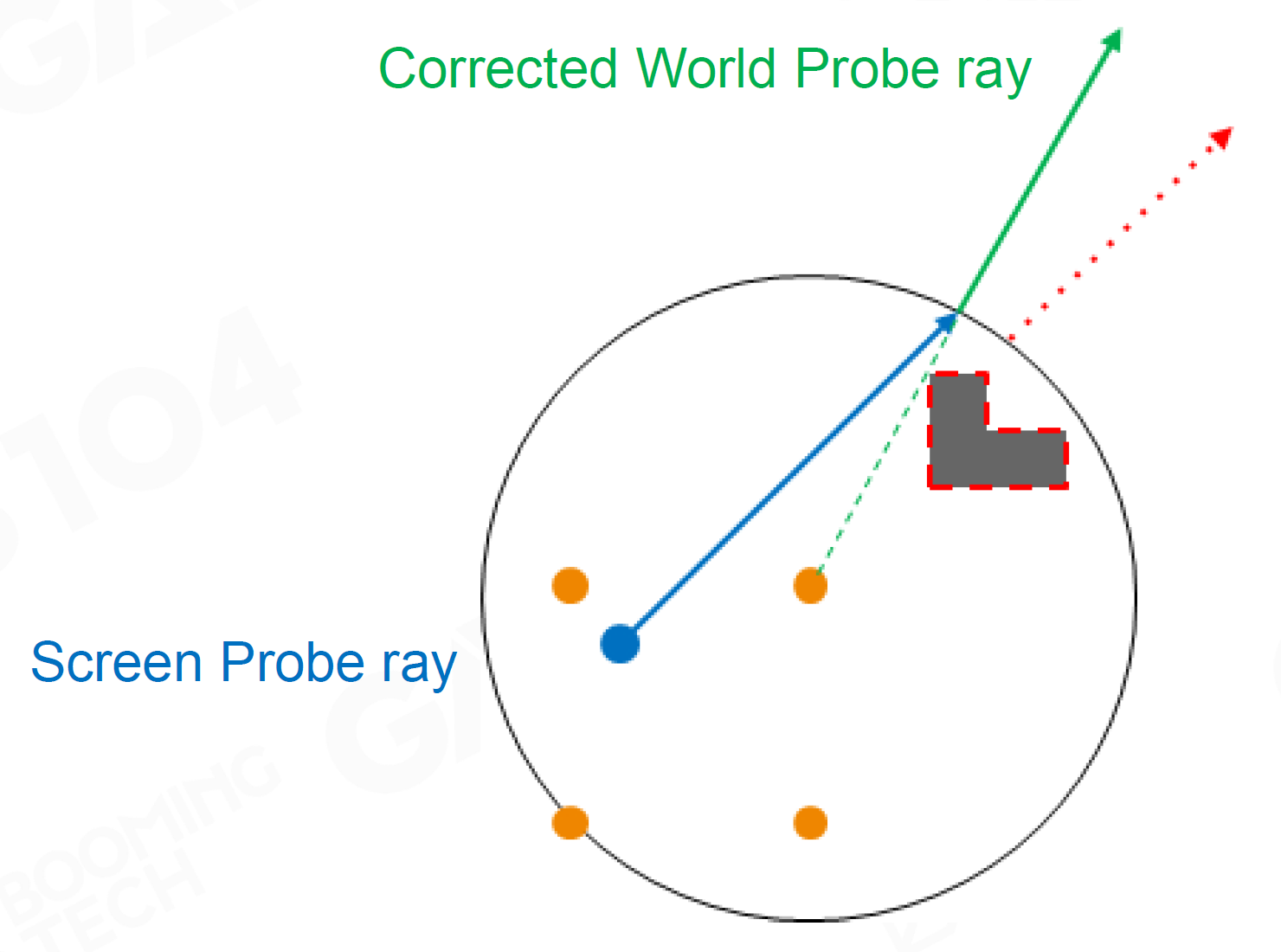
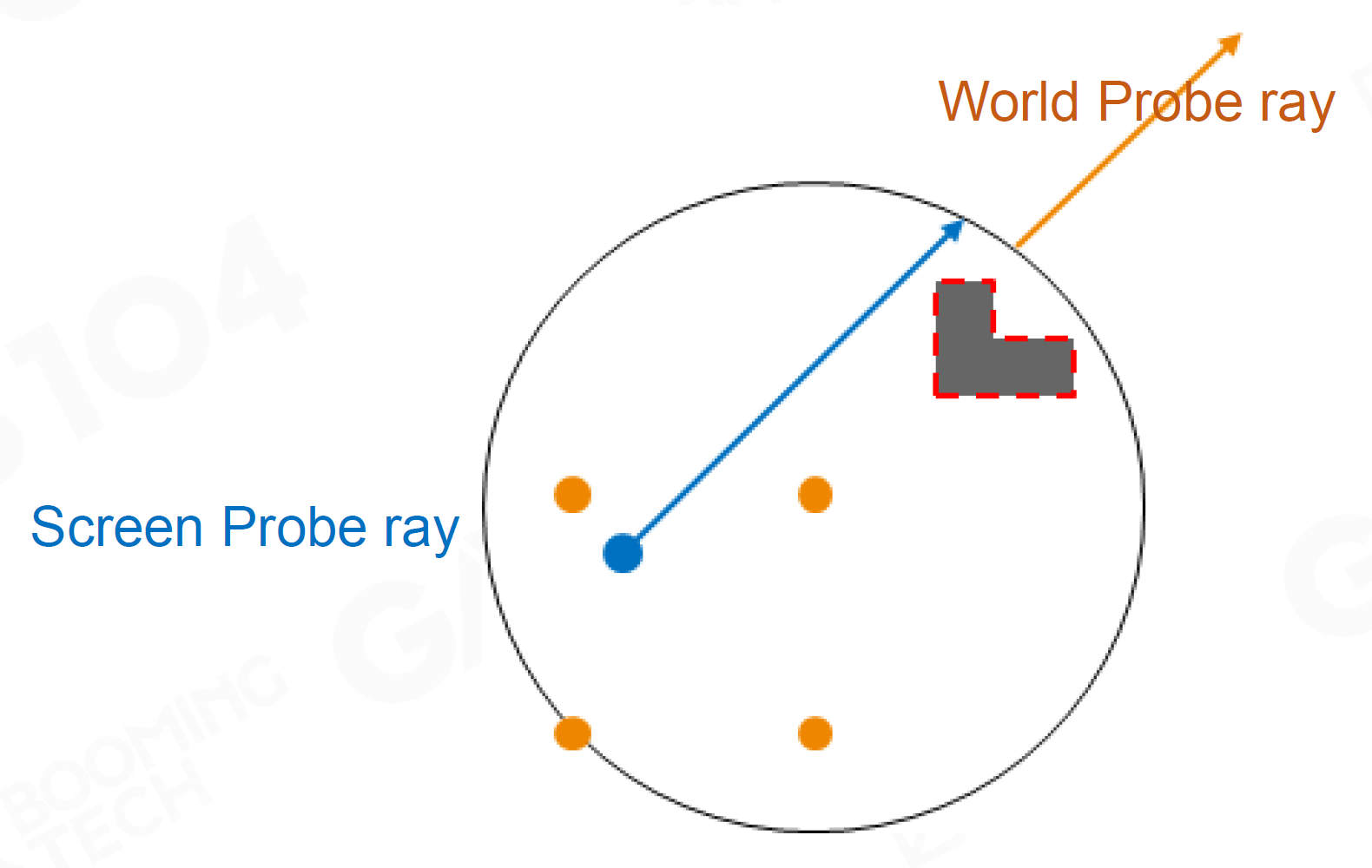 球面parallax,如图修改光线,导致光线转弯,但Hack可接受
球面parallax,如图修改光线,导致光线转弯,但Hack可接受
- World Space Probe当且仅当有Screen Space Probe有采样需求时,才做Trace并更新光照
- 取Screen Space Probe邻近8个World Space Probe,距离权重插值。
Phase 4 : Shading Full Pixels with Screen Space Probes
将Probe Radiance转换为三阶SH
- 相当于对Radiance做低通滤波,效果更柔和
- SH积分更快速友好,质量也更高
- 最后利用SH着色
Overall, Performance and Result
- 核心思想:利用对不同数据结构、不同采样对象做Ray
Tracing的硬件开销不一样
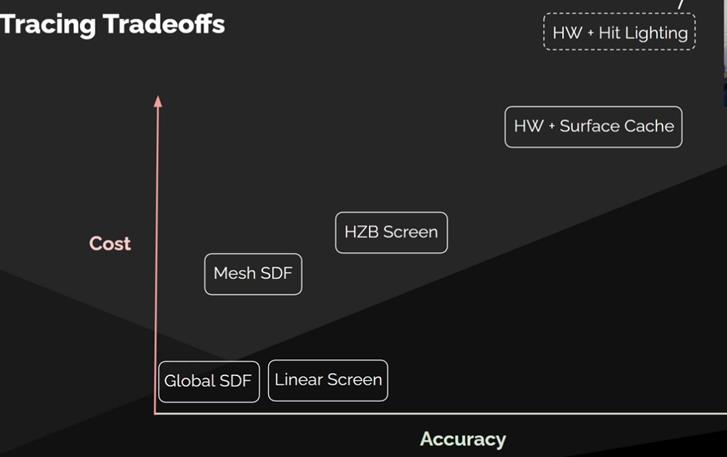
- 根据具体情况应用不同的方式

- Fallback过程